注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.1.8 過熱モニター (MCP3008)
注釈
使用しているキットのバージョンによって、 ADC0834 か MCP3008 のどちらを搭載しているか確認し、それぞれ対応する節を参照してください。
導入
工場などの現場で回路が過熱した際、アラームを出し、適時に自動で機械を停止させたい場合があります。本プロジェクトでは、サーミスタ・ジョイスティック・ブザー・LED・LCD を利用し、しきい値を調整可能な温度監視装置を製作します。
必要な部品
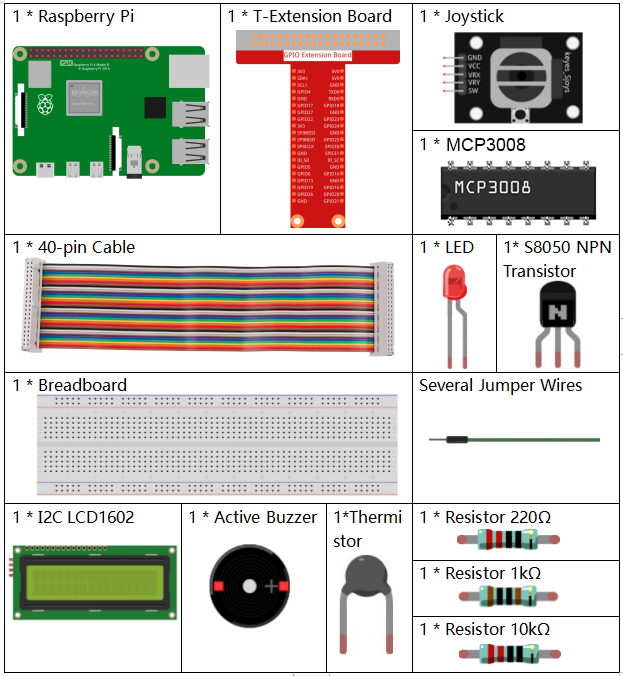
このプロジェクトでは以下の部品を使用します。
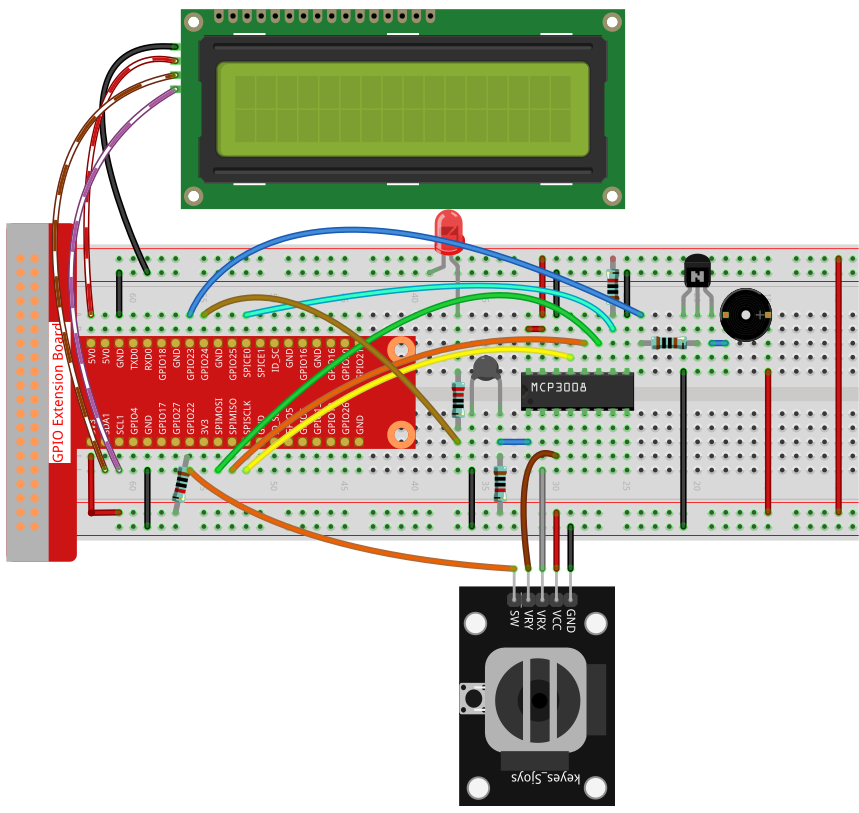
回路図
T-Board 名称 |
物理ピン |
wiringPi |
BCM |
SPICE0 |
Pin 24 |
10 |
8 |
SPIMOSI |
Pin 19 |
12 |
10 |
SPIMISO |
Pin 21 |
13 |
9 |
SPISCLK |
Pin 23 |
14 |
11 |
GPIO22 |
Pin15 |
3 |
22 |
GPIO23 |
Pin16 |
4 |
23 |
GPIO24 |
Pin18 |
5 |
24 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |

実験手順
手順1: 回路を組み立てます。
C言語利用者向け
手順2: コードのあるフォルダに移動します。
cd ~/davinci-kit-for-raspberry-pi/c/3.1.8-2/
手順3: コードをコンパイルします。
gcc 3.1.8_OverheatMonitor.c -lm -lwiringPi
手順4: 実行ファイルを実行します。
sudo ./a.out
コードが実行されると、現在の温度と高温しきい値 40 が I2C LCD1602 に表示されます。現在の温度がしきい値を超えると、ブザーとLEDが動作して警告します。
ジョイスティック はしきい値を調整するために使用します。ジョイスティックをX軸またはY軸方向に倒すと、高温しきい値を上下に調整できます。ジョイスティックを再度押すと、しきい値は初期値にリセットされます。
注釈
wiringPi.h: No such file or directoryというエラーが出る場合は、wiringPi のインストールと確認 を参照してください。Unable to open I2C device: No such file or directoryというエラーが出る場合は、I²C 設定 を参照し、I2Cを有効化し配線が正しいか確認してください。コードと配線に問題がないのにLCDが表示されない場合は、背面のポテンショメータを回してコントラストを上げてください。
コード
#include <wiringPi.h>
#include <stdio.h>
#include <wiringPiI2C.h>
#include <wiringPiSPI.h>
#include <string.h>
#include <math.h>
typedef unsigned char uchar;
typedef unsigned int uint;
#define Joy_BtnPin 3 // GPIO22 -> WiringPi 3
#define buzzPin 4 // GPIO23 -> WiringPi 4
#define LedPin 5 // GPIO24 -> WiringPi 5
#define SPI_CHANNEL 0
#define SPI_SPEED 1000000
int LCDAddr = 0x27;
int BLEN = 1;
int fd;
int upperTem = 40;
// Global variable to store the last joystick change
int lastJoystickChange = 0;
int read_ADC(int channel) {
if (channel < 0 || channel > 7) return -1;
unsigned char buffer[3];
buffer[0] = 1;
buffer[1] = (8 + channel) << 4;
buffer[2] = 0;
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
return ((buffer[1] & 0x03) << 8) | buffer[2];
}
void write_word(int data){
int temp = data;
if (BLEN) temp |= 0x08;
else temp &= 0xF7;
wiringPiI2CWrite(fd, temp);
}
void send_command(int comm){
int buf = comm & 0xF0;
buf |= 0x04; write_word(buf); delay(2); buf &= 0xFB; write_word(buf);
buf = (comm & 0x0F) << 4;
buf |= 0x04; write_word(buf); delay(2); buf &= 0xFB; write_word(buf);
}
void send_data(int data){
int buf = data & 0xF0;
buf |= 0x05; write_word(buf); delay(2); buf &= 0xFB; write_word(buf);
buf = (data & 0x0F) << 4;
buf |= 0x05; write_word(buf); delay(2); buf &= 0xFB; write_word(buf);
}
void lcd_init(){
send_command(0x33); delay(5);
send_command(0x32); delay(5);
send_command(0x28); delay(5);
send_command(0x0C); delay(5);
send_command(0x01); wiringPiI2CWrite(fd, 0x08);
}
void lcd_clear(){
send_command(0x01);
}
void write_lcd(int x, int y, const char data[]){
int addr = 0x80 + 0x40 * y + x;
send_command(addr);
for (int i = 0; i < (int)strlen(data); i++)
send_data(data[i]);
}
int get_joystick_value(){
int x = read_ADC(1);
int y = read_ADC(2);
// Dead-band filtering to reduce small fluctuations
if (x > 900) return 1; // else if (x < 100) return -1; // else if (y > 900) return -10; // else if (y < 100) return 10; // else return 0;
}
void upper_tem_setting(){
write_lcd(0,0, "Upper Adjust:");
int change = get_joystick_value();
// Only respond to actual direction change
if (change != 0 && change != lastJoystickChange) {
upperTem += change;
lastJoystickChange = change;
}
else if (change == 0) {
// Allow next change after returning to center
lastJoystickChange = 0;
}
// Display current upperTem
char str[6];
snprintf(str, sizeof(str), "%d", upperTem);
write_lcd(0,1, str);
// Clear remaining LCD characters
write_lcd(strlen(str),1, " ");
delay(100);
}
double temperature(){
int raw = read_ADC(0);
double Vr = 3.3 * ((double)raw / 1023.0);
double Rt = 10000.0 * Vr / (3.3 - Vr);
double tempK = 1.0 / ((log(Rt/10000.0)/3950.0) + 1.0/(273.15+25.0));
return tempK - 273.15;
}
void monitoring_temp(){
char str[6];
double cel = temperature();
snprintf(str, sizeof(str), "%.2f", cel);
write_lcd(0,0, "Temp: ");
write_lcd(6,0, str);
snprintf(str, sizeof(str), "%d", upperTem);
write_lcd(0,1, "Upper: ");
write_lcd(7,1, str);
delay(100);
if (cel >= upperTem) {
digitalWrite(buzzPin, HIGH);
digitalWrite(LedPin, HIGH);
} else {
digitalWrite(buzzPin, LOW);
digitalWrite(LedPin, LOW);
}
}
void setup_all(){
fd = wiringPiI2CSetup(LCDAddr);
lcd_init();
if (wiringPiSetup() == -1 ||
wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) {
printf("Setup failed!\n");
return;
}
pinMode(Joy_BtnPin, INPUT);
pullUpDnControl(Joy_BtnPin, PUD_UP);
pinMode(buzzPin, OUTPUT);
pinMode(LedPin, OUTPUT);
}
int main(void){
setup_all();
int lastBtnState = HIGH;
int stage = 0;
while (1) {
int curBtn = digitalRead(Joy_BtnPin);
// Switch mode when button changes from LOW to HIGH (button released)
if (curBtn == HIGH && lastBtnState == LOW) {
stage = (stage + 1) % 2;
lastJoystickChange = 0; // Clear debounce status
delay(100);
lcd_clear();
}
lastBtnState = curBtn;
if (stage == 1)
upper_tem_setting();
else
monitoring_temp();
}
return 0;
}
コード解説
int read_ADC(int channel) {
if (channel < 0 || channel > 7) return -1;
unsigned char buffer[3];
buffer[0] = 1;
buffer[1] = (8 + channel) << 4;
buffer[2] = 0;
wiringPiSPIDataRW(SPI_CHANNEL, buffer, 3);
return ((buffer[1] & 0x03) << 8) | buffer[2];
}
SPIを使ってMCP3008のチャンネル (CH0–CH7) から10ビットのアナログ値を読み取り、0〜1023の整数を返します。
int get_joystick_value() {
int x = read_ADC(1);
int y = read_ADC(2);
if (x > 900) return 1; // 右
else if (x < 100) return -1; // 左
else if (y > 900) return -10; // 上
else if (y < 100) return 10; // 下
else return 0;
}
CH1とCH2からジョイスティックのX軸・Y軸のアナログ値を読み取ります。しきい値に基づき、動作方向を表す整数を返します。
void upper_tem_setting() {
write_lcd(0,0, "Upper Adjust:");
int change = get_joystick_value();
if (change != 0 && change != lastJoystickChange) {
upperTem += change;
lastJoystickChange = change;
}
else if (change == 0) {
lastJoystickChange = 0;
}
char str[6];
snprintf(str, sizeof(str), "%d", upperTem);
write_lcd(0,1, str);
write_lcd(strlen(str),1, " ");
delay(100);
}
ジョイスティックを使って高温しきい値を調整します。方向を押し続けた場合でも、繰り返し変化しないよう制御します。
double temperature() {
int raw = read_ADC(0);
double Vr = 3.3 * ((double)raw / 1023.0);
double Rt = 10000.0 * Vr / (3.3 - Vr);
double tempK = 1.0 / ((log(Rt/10000.0)/3950.0) + 1.0/(273.15+25.0));
return tempK - 273.15;
}
CH0に接続されたサーミスタのアナログ値を読み取ります。Steinhart–Hart方程式を用いて摂氏温度を計算します。
void monitoring_temp() {
char str[6];
double cel = temperature();
snprintf(str, sizeof(str), "%.2f", cel);
write_lcd(0,0, "Temp: ");
write_lcd(6,0, str);
snprintf(str, sizeof(str), "%d", upperTem);
write_lcd(0,1, "Upper: ");
write_lcd(7,1, str);
delay(100);
if (cel >= upperTem) {
digitalWrite(buzzPin, HIGH);
digitalWrite(LedPin, HIGH);
} else {
digitalWrite(buzzPin, LOW);
digitalWrite(LedPin, LOW);
}
}
現在の温度を継続的に読み取り、しきい値とともに表示します。温度がしきい値を超えた場合、ブザーとLEDを動作させます。
void setup_all() {
fd = wiringPiI2CSetup(LCDAddr);
lcd_init();
if (wiringPiSetup() == -1 || wiringPiSPISetup(SPI_CHANNEL, SPI_SPEED) == -1) {
printf("Setup failed!\n");
return;
}
pinMode(Joy_BtnPin, INPUT);
pullUpDnControl(Joy_BtnPin, PUD_UP);
pinMode(buzzPin, OUTPUT);
pinMode(LedPin, OUTPUT);
}
LCD、SPI、GPIOピンを初期化します。ジョイスティックのボタンにはプルアップを設定し、ブザーとLEDも出力モードにします。
int main(void) {
setup_all();
int lastBtnState = HIGH;
int stage = 0;
while (1) {
int curBtn = digitalRead(Joy_BtnPin);
if (curBtn == HIGH && lastBtnState == LOW) {
stage = (stage + 1) % 2;
lastJoystickChange = 0;
delay(100);
lcd_clear();
}
lastBtnState = curBtn;
if (stage == 1)
upper_tem_setting();
else
monitoring_temp();
}
return 0;
}
メインループは2つのモードを切り替えます:
温度監視モード
ジョイスティックによる上限調整モード
ジョイスティックボタンを離したタイミング(立ち上がりエッジ)でモードが切り替わります。
Python言語利用者向け
手順2: SPIインターフェースを設定し、 spidev ライブラリをインストールします(詳細は SPI 設定 を参照)。すでに完了している場合、この手順は省略できます。
手順3: コードのあるフォルダに移動します。
cd ~/davinci-kit-for-raspberry-pi/python
手順4: 実行ファイルを実行します。
sudo python3 3.1.8-2_OverheatMonitor.py
コードが実行されると、現在の温度と高温しきい値 40 が I2C LCD1602 に表示されます。現在の温度がしきい値を超えると、ブザーとLEDが動作して警告します。
ジョイスティック は高温しきい値を調整するために使用します。X軸・Y軸方向に倒すことでしきい値を上下させられ、ボタンを押すと初期値にリセットされます。
注釈
FileNotFoundError: [Errno 2] No such file or directory: '/dev/i2c-1'が出る場合は、I²C 設定 を参照してI2Cを有効化してください。ModuleNotFoundError: No module named 'smbus2'が出る場合は、sudo pip3 install smbus2を実行してください。OSError: [Errno 121] Remote I/O errorが出る場合は、モジュールの配線間違いや故障が原因です。コードと配線に問題がなくてもLCDが表示しない場合、背面のポテンショメータを回してコントラストを上げてください。
警告
RuntimeError: Cannot determine SOC peripheral base address が出る場合は、「gpiozero」が動作しない場合。 を参照してください。
コード
注釈
以下のコードは 修正 / リセット / コピー / 実行 / 停止 が可能です。ただしその前に davinci-kit-for-raspberry-pi/python のソースコードパスへ移動する必要があります。コードを修正した後は、そのまま実行して動作を確認できます。
#!/usr/bin/env python3
import RPi.GPIO as GPIO
import spidev
import time
import math
import LCD1602
# GPIO pin definitions
JOY_BTN_PIN = 22 # Button pin
BUZZER_PIN = 23 # Buzzer pin
LED_PIN = 24 # LED pin
# Initialize GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(JOY_BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP)
GPIO.setup(BUZZER_PIN, GPIO.OUT)
GPIO.setup(LED_PIN, GPIO.OUT)
# Set initial upper temperature threshold
upperTem = 40
# Initialize SPI for MCP3008
spi = spidev.SpiDev()
spi.open(0, 0)
spi.max_speed_hz = 1000000 # 1 MHz
# Initialize LCD1602
LCD1602.init(0x27, 1)
def read_adc(channel):
"""
Read analog value from MCP3008 (0–7)
"""
if channel < 0 or channel > 7:
return -1
adc = spi.xfer2([1, (8 + channel) << 4, 0])
value = ((adc[1] & 0x03) << 8) | adc[2]
return value
def get_joystick_value():
"""
Reads the joystick values and returns a change value based on the joystick's position.
"""
x_val = read_adc(1)
y_val = read_adc(2)
if x_val > 800:
return 1
elif x_val < 200:
return -1
elif y_val > 800:
return -10
elif y_val < 200:
return 10
else:
return 0
def upper_tem_setting():
"""
Adjusts and displays the upper temperature threshold on the LCD.
"""
global upperTem
LCD1602.write(0, 0, 'Upper Adjust: ')
change = int(get_joystick_value())
upperTem += change
strUpperTem = str(upperTem)
LCD1602.write(0, 1, strUpperTem)
LCD1602.write(len(strUpperTem), 1, ' ')
time.sleep(0.1)
def temperature():
"""
Reads the current temperature from the sensor and returns it in Celsius.
"""
analogVal = read_adc(0)
Vr = 3.3 * analogVal / 1023.0
if Vr == 0:
return 0
Rt = 10000.0 * (3.3 - Vr) / Vr
tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0)))
Cel = tempK - 273.15
return round(Cel, 2)
def monitoring_temp():
"""
Monitors and displays the current temperature and upper temperature threshold.
Activates buzzer and LED if the temperature exceeds the upper limit.
"""
global upperTem
Cel = temperature()
LCD1602.write(0, 0, 'Temp: ')
LCD1602.write(0, 1, 'Upper: ')
LCD1602.write(6, 0, str(Cel))
LCD1602.write(7, 1, str(upperTem))
time.sleep(0.1)
if Cel >= upperTem:
GPIO.output(BUZZER_PIN, GPIO.HIGH)
GPIO.output(LED_PIN, GPIO.HIGH)
else:
GPIO.output(BUZZER_PIN, GPIO.LOW)
GPIO.output(LED_PIN, GPIO.LOW)
# Main loop
try:
lastState = GPIO.input(JOY_BTN_PIN)
stage = 0
while True:
currentState = GPIO.input(JOY_BTN_PIN)
if currentState == GPIO.HIGH and lastState == GPIO.LOW:
stage = (stage + 1) % 2
time.sleep(0.1)
LCD1602.clear()
lastState = currentState
if stage == 1:
upper_tem_setting()
else:
monitoring_temp()
except KeyboardInterrupt:
pass
finally:
LCD1602.clear()
GPIO.cleanup()
spi.close()
コード解説
ライブラリのインポート
GPIO、SPI、LCD表示、時間制御、数値計算に必要なライブラリを読み込みます。
#!/usr/bin/env python3 import RPi.GPIO as GPIO import spidev import time import math import LCD1602
GPIOとデバイス設定
ジョイスティックのボタン、ブザー、LED のGPIOピンを定義し、GPIOモードを設定します。
JOY_BTN_PIN = 22 # ボタンのピン BUZZER_PIN = 23 # ブザーのピン LED_PIN = 24 # LEDのピン GPIO.setmode(GPIO.BCM) GPIO.setup(JOY_BTN_PIN, GPIO.IN, pull_up_down=GPIO.PUD_UP) GPIO.setup(BUZZER_PIN, GPIO.OUT) GPIO.setup(LED_PIN, GPIO.OUT)
SPIとLCDの初期化
MCP3008用のSPIインターフェースを開始し、I2Cアドレス 0x27 のLCD1602画面を初期化します。
upperTem = 40 spi = spidev.SpiDev() spi.open(0, 0) spi.max_speed_hz = 1000000 LCD1602.init(0x27, 1)
ADC値の読み取り
SPIを介してMCP3008からアナログデータを読み取ります。チャンネルは0〜7の範囲で指定します。
def read_adc(channel): if channel < 0 or channel > 7: return -1 adc = spi.xfer2([1, (8 + channel) << 4, 0]) value = ((adc[1] & 0x03) << 8) | adc[2] return value
ジョイスティックの動き検出
ジョイスティックのX軸・Y軸値を読み取り、しきい値の変更量を返します。
def get_joystick_value(): x_val = read_adc(1) y_val = read_adc(2) if x_val > 800: return 1 elif x_val < 200: return -1 elif y_val > 800: return -10 elif y_val < 200: return 10 else: return 0
上限温度しきい値の調整
LCDに「Upper Adjust」を表示し、ジョイスティック入力でしきい値を調整します。
def upper_tem_setting(): global upperTem LCD1602.write(0, 0, 'Upper Adjust: ') change = int(get_joystick_value()) upperTem += change strUpperTem = str(upperTem) LCD1602.write(0, 1, strUpperTem) LCD1602.write(len(strUpperTem), 1, ' ') time.sleep(0.1)
温度計算
アナログセンサー値を電圧と抵抗に変換し、Steinhart–Hart近似式で摂氏温度を算出します。
def temperature(): analogVal = read_adc(0) Vr = 3.3 * analogVal / 1023.0 if Vr == 0: return 0 Rt = 10000.0 * (3.3 - Vr) / Vr tempK = 1.0 / (((math.log(Rt / 10000.0)) / 3950.0) + (1.0 / (273.15 + 25.0))) Cel = tempK - 273.15 return round(Cel, 2)
温度モニタリング
現在温度としきい値を継続的に確認し表示します。温度がしきい値を超えるとブザーとLEDを点灯させます。
def monitoring_temp(): global upperTem Cel = temperature() LCD1602.write(0, 0, 'Temp: ') LCD1602.write(0, 1, 'Upper: ') LCD1602.write(6, 0, str(Cel)) LCD1602.write(7, 1, str(upperTem)) time.sleep(0.1) if Cel >= upperTem: GPIO.output(BUZZER_PIN, GPIO.HIGH) GPIO.output(LED_PIN, GPIO.HIGH) else: GPIO.output(BUZZER_PIN, GPIO.LOW) GPIO.output(LED_PIN, GPIO.LOW)
メイン処理の流れ
ジョイスティックのボタンが押されたとき、温度モニタリングモードとしきい値調整モードを切り替えます。
try: lastState = GPIO.input(JOY_BTN_PIN) stage = 0 while True: currentState = GPIO.input(JOY_BTN_PIN) if currentState == GPIO.HIGH and lastState == GPIO.LOW: stage = (stage + 1) % 2 time.sleep(0.1) LCD1602.clear() lastState = currentState if stage == 1: upper_tem_setting() else: monitoring_temp()
終了時の後処理
Ctrl+Cで終了した際、GPIOとSPIリソースを正しく解放します。
except KeyboardInterrupt: pass finally: LCD1602.clear() GPIO.cleanup() spi.close()