注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.1.10 警報ベル
前書き
このコースでは、手動警報装置を作成する。 トグルスイッチをサーミスタまたは感光センサーに交換して、温度警報または光警報を作成できる。
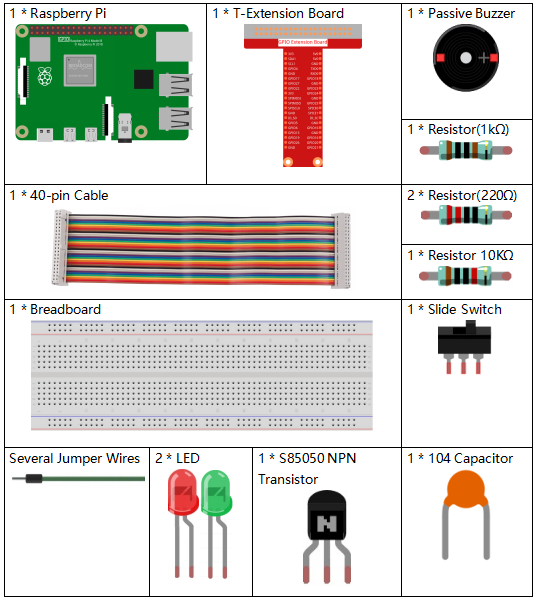
部品
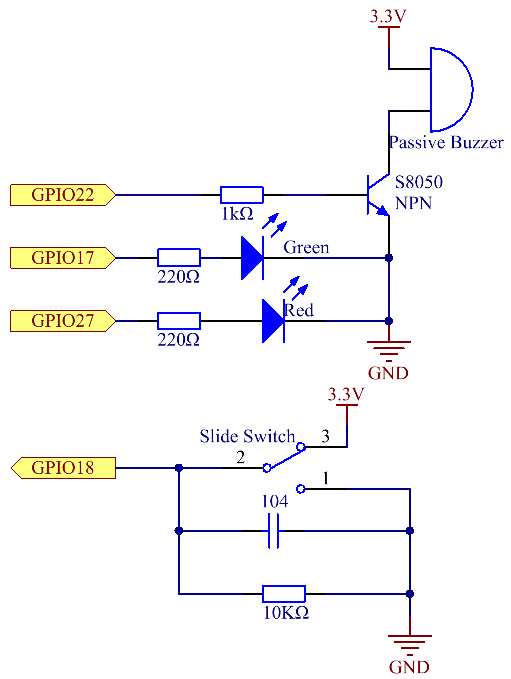
回路図
T-Board Name |
physical |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
実験手順
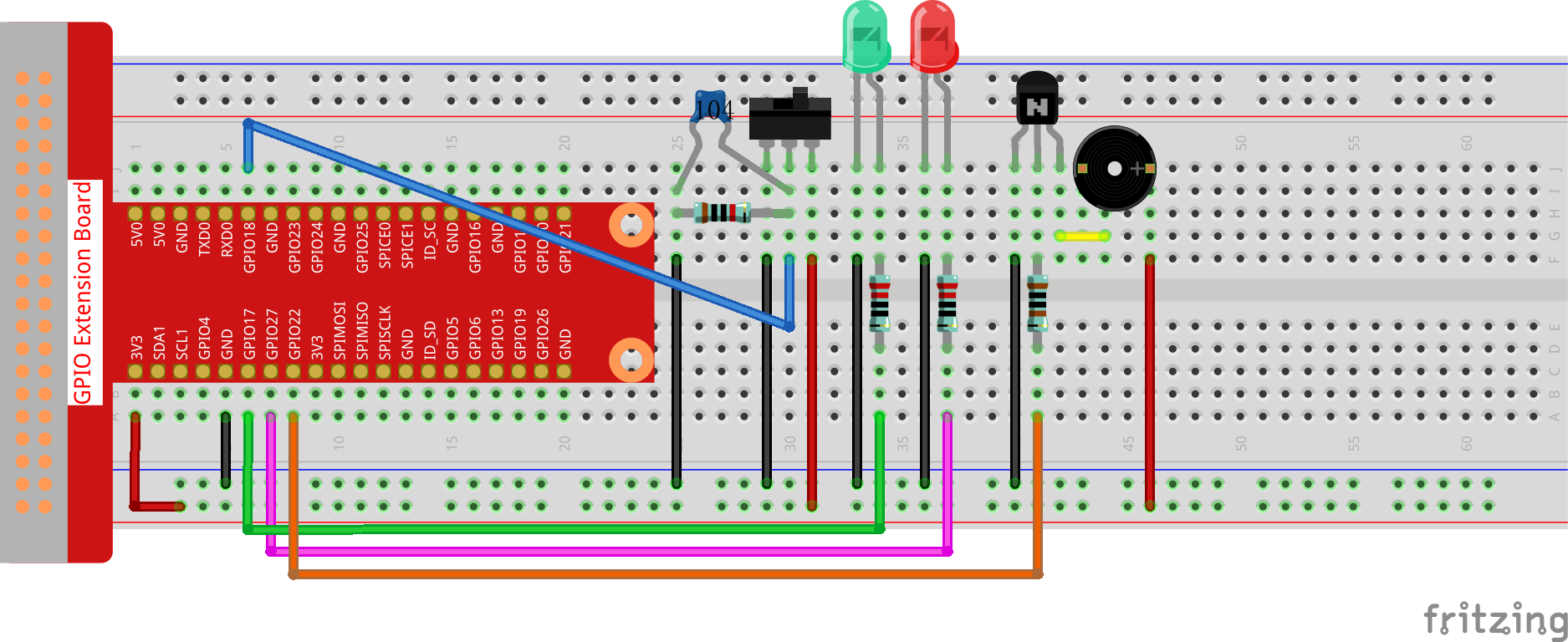
ステップ1: 回路を作る。
C言語ユーザー向け
ステップ2: ディレクトリを変更する。
cd ~/davinci-kit-for-raspberry-pi/c/3.1.10/
ステップ3: コンパイルする。
gcc 3.1.10_AlarmBell.c -lwiringPi -lpthread
ステップ4: 実行。
sudo ./a.out
プログラムが起動すると、トグルスイッチが右に切り替わり、ブザーが警報音を出す。同時に、特定の周波数で赤と緑のLEDが点滅する。
コードの説明
#include <pthread.h>
このコードでは、新しいライブラリ thread.h を使用する。
これは、一般的なスレッドライブラリのセットであり、マルチスレッドを実現できる。
コンパイル時に -lpthread パラメーターを追加して、LEDとブザーを独立して動作させる。
void *ledWork(void *arg){
while(1)
{
if(flag==0){
pthread_exit(NULL);
}
digitalWrite(ALedPin,HIGH);
delay(500);
digitalWrite(ALedPin,LOW);
digitalWrite(BLedPin,HIGH);
delay(500);
digitalWrite(BLedPin,LOW);
}
}
関数 ledWork() は、これら2つのLEDの動作状態を設定するために役立つ:
緑色のLEDを0.5秒間点灯させた後、消灯する。同様に、赤いLEDを0.5秒間点灯させてから消灯する。
void *buzzWork(void *arg){
while(1)
{
if(flag==0){
pthread_exit(NULL);
}
if((note>=800)||(note<=130)){
pitch = -pitch;
}
note=note+pitch;
softToneWrite(BeepPin,note);
delay(10);
}
}
関数 buzzWork() は、ブザーの動作状態を設定するために使用される。
ここでは、周波数を130〜800に設定し、20の間隔で累積・減衰する。
void on(){
flag = 1;
if(softToneCreate(BeepPin) == -1){
printf("setup softTone failed !");
return;
}
pthread_t tLed;
pthread_create(&tLed,NULL,ledWork,NULL);
pthread_t tBuzz;
pthread_create(&tBuzz,NULL,buzzWork,NULL);
}
関数 on() で:
制御スレッドの終了を示すマーク「flag = 1」を定義する。
ソフトウェア制御のトーンピン
BeepPinを作成する。LEDとブザーが同時に動作できるように、二つの個別のスレッドを作成する。
pthread_t tLed : スレッド tLed を宣言する。
pthread_create(&tLed,NULL,ledWork,NULL) : スレッドを作成し、そのプロトタイプは次の通りである: int pthread_create(pthread_t *restrict tidp,const pthread_attr_t *restrict attr,void*(*start_rtn)(void*),void *restrict arg);
値を返す
成功した場合は「0」を返し、それ以外の場合は落下数「-1」を返します。
パラメータ
最初のパラメーターは、スレッドIDへのポインターです。
2つ目は、スレッド属性を設定するために使用されます。
3番目は、スレッド実行関数の開始アドレスです。
最後のものは、関数を実行するものです。
void off(){
flag = 0;
softToneStop(BeepPin);
digitalWrite(ALedPin,LOW);
digitalWrite(BLedPin,LOW);
}
スレッド ledWork と BuzzWork を終了するために、
関数 Off() は「flag = 0」を定義しそして、ブザーとLEDをオフにする。
int main(){
setup();
int lastState = 0;
while(1){
int currentState = digitalRead(switchPin);
if ((currentState == 1)&&(lastState==0)){
on();
}
else if((currentState == 0)&&(lastState==1)){
off();
}
lastState=currentState;
}
return 0;
}
main() には、プログラムのプロセス全体が含まれている:まず、スライドスイッチの値を読み取る。
トグルスイッチが右に切り替えられた場合(読み取り値が1)、関数 on() が呼び出され、
ブザーが駆動されて音が鳴り、赤と緑のLEDが点滅する。そうしないと、ブザーとLEDが機能しない。
Python言語ユーザー向け
ステップ2: ディレクトリを変更する。
cd ~/davinci-kit-for-raspberry-pi/python/
ステップ3: 実行する。
sudo python3 3.1.10_AlarmBell.py
プログラムが起動すると、トグルスイッチが右に切り替わり、 ブザーが警報音を出す。同時に、特定の周波数で赤と緑のLEDが点滅する。
コード
注釈
以下のコードを 変更/リセット/コピー/実行/停止 できます。 ただし、その前に、 davinci-kit-for-raspberry-pi/python のようなソースコードパスに移動する必要があります。
import RPi.GPIO as GPIO
import time
import threading
BeepPin=22
ALedPin=17
BLedPin=27
switchPin=18
Buzz=0
flag =0
note=150
pitch=20
def setup():
GPIO.setmode(GPIO.BCM)
GPIO.setup(BeepPin, GPIO.OUT)
GPIO.setup(ALedPin,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(BLedPin,GPIO.OUT,initial=GPIO.LOW)
GPIO.setup(switchPin,GPIO.IN)
global Buzz
Buzz=GPIO.PWM(BeepPin,note)
def ledWork():
while flag:
GPIO.output(ALedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(BLedPin,GPIO.LOW)
def buzzerWork():
global pitch
global note
while flag:
if note >= 800 or note <=130:
pitch = -pitch
note = note + pitch
Buzz.ChangeFrequency(note)
time.sleep(0.01)
def on():
global flag
flag = 1
Buzz.start(50)
tBuzz = threading.Thread(target=buzzerWork)
tBuzz.start()
tLed = threading.Thread(target=ledWork)
tLed.start()
def off():
global flag
flag = 0
Buzz.stop()
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.LOW)
def main():
lastState=0
while True:
currentState =GPIO.input(switchPin)
if currentState == 1 and lastState == 0:
on()
elif currentState == 0 and lastState == 1:
off()
lastState=currentState
def destroy():
off()
GPIO.cleanup()
if __name__ == '__main__':
setup()
try:
main()
except KeyboardInterrupt:
destroy()
コードの説明
import threading
ここでは、 Threading モジュールをインポートし、
複数のことを一度に行えるようにするが、通常のプログラムはコードを上から下にしか実行できない。
Threading モジュールを使用すると、LEDとブザーを個別に動作させることができる。
def ledWork():
while flag:
GPIO.output(ALedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.HIGH)
time.sleep(0.5)
GPIO.output(BLedPin,GPIO.LOW)
関数 ledWork() は、これら2つのLEDの動作状態を設定するために役立つ:緑色のLEDを0.5秒間点灯させた後、消灯する。
同様に、赤いLEDを0.5秒間点灯させてから消灯する。
def buzzerWork():
global pitch
global note
while flag:
if note >= 800 or note <=130:
pitch = -pitch
note = note + pitch
Buzz.ChangeFrequency(note)
time.sleep(0.01)
関数 buzzWork() は、ブザーの動作状態を設定するために使用される。
ここでは、周波数を130〜800に設定し、20の間隔で累積・減衰する。
def on():
global flag
flag = 1
Buzz.start(50)
tBuzz = threading.Thread(target=buzzerWork)
tBuzz.start()
tLed = threading.Thread(target=ledWork)
tLed.start()
関数 on() で:
制御スレッドの終了を示すマーク「flag = 1」を定義する。
バズを開始し、デューティサイクルを50%に設定する。
LEDとブザ ー が同時に動作できるように、二つの個別のスレッドを作成する。
tBuzz = threading.Thread(target=buzzerWork) : スレッドを作成すると、そのプロトタイプは以下の通りである: class threading.Thread(group=None, target=None, name=None, args=(), kwargs={}, \*, daemon=None)
構築メソッドの中で、主要なパラメーターは ターゲット であり、呼び出し可能なオブジェクト(ここでは関数 ledWork と BuzzWork )を ターゲット に割り当てる必要がある。
次に、スレッドオブジェクトを開始するために start() が呼び出される。
たとえば、 tBuzz.start() は、新しくインストールされたtBuzzスレッドを開始するために使用される。
def off():
global flag
flag = 0
Buzz.stop()
GPIO.output(ALedPin,GPIO.LOW)
GPIO.output(BLedPin,GPIO.LOW)
スレッド ledWork と BuzzWork を終了するために、
関数 Off() は「flag = 0」を定義しそして、ブザーとLEDをオフにする。
def main():
lastState=0
while True:
currentState =GPIO.input(switchPin)
if currentState == 1 and lastState == 0:
on()
elif currentState == 0 and lastState == 1:
off()
lastState=currentState
main() には、プログラムのプロセス全体が含まれている:
まず、スライドスイッチの値を読み取る。
トグルスイッチが右に切り替えられた場合(読み取り値が1)、関数 on() が呼び出され、
ブザーが駆動されて音が鳴り、赤と緑のLEDが点滅する。そうしないと、ブザーとLEDが機能しない。
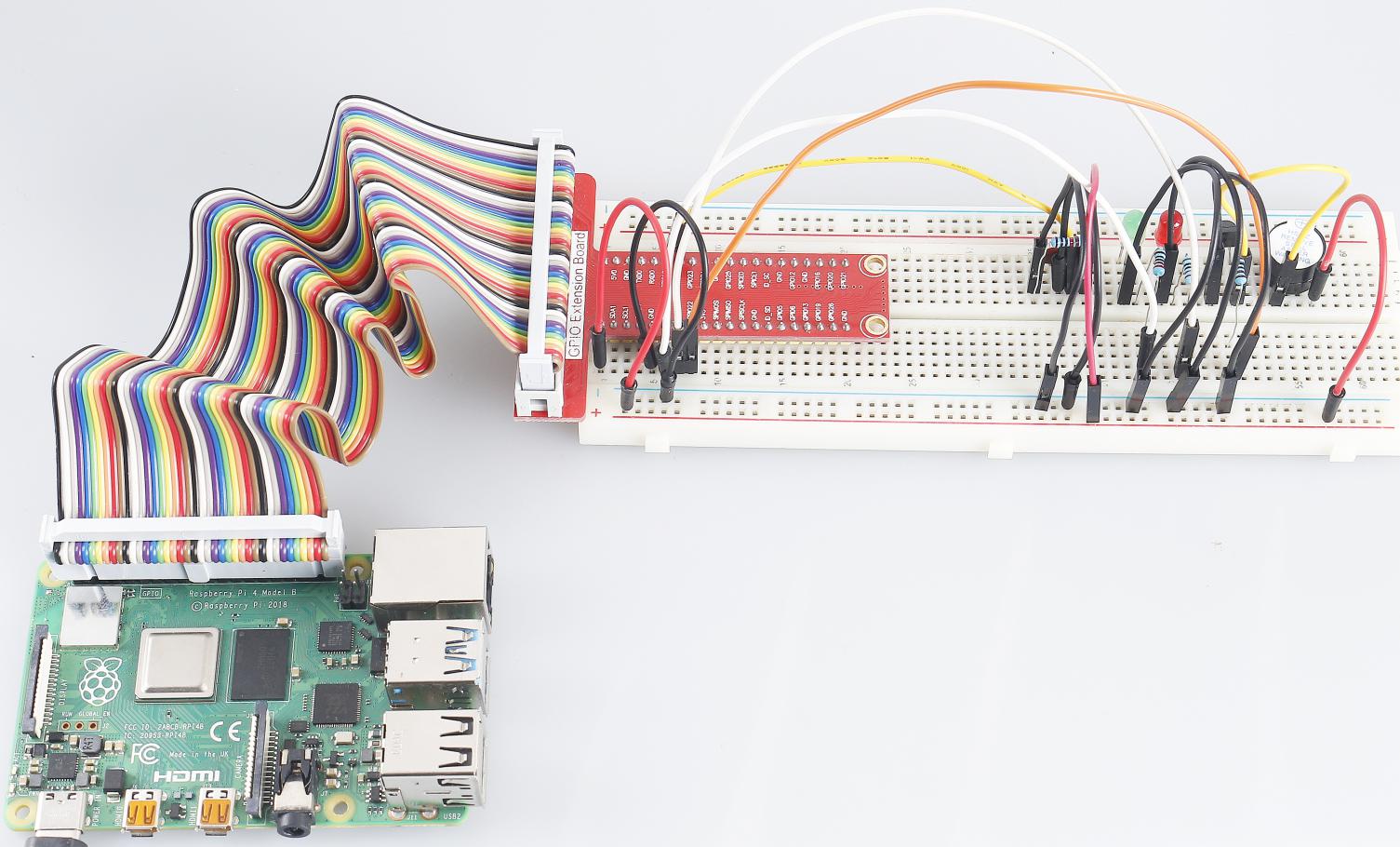
現象画像