注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.1.4 スマートファン
注釈
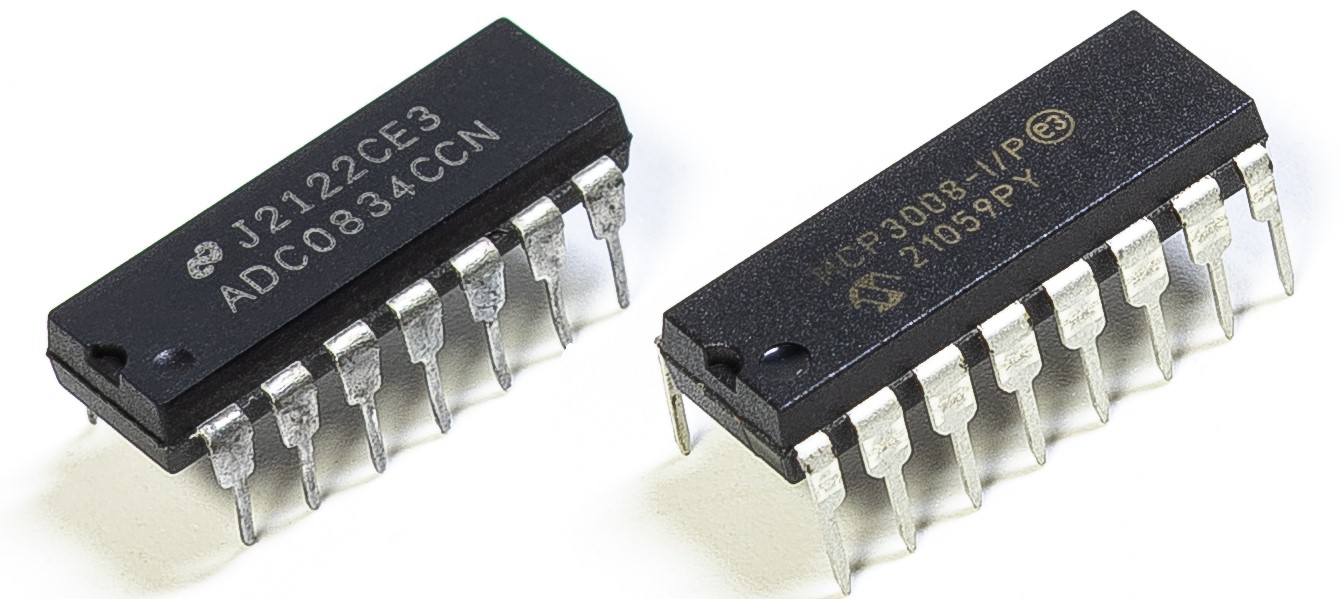
お使いのキットの種類によって、 ADC0834 か MCP3008 のどちらかをご確認のうえ、それぞれの説明に進んでください。
前書き
このコースでは、モーター、ボタン、サーミスターを使用して、 風速が調整可能な手動+自動のスマートファンを作成する。
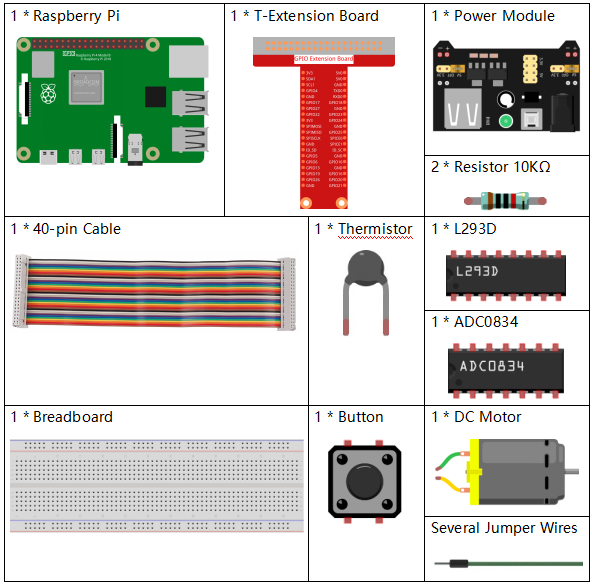
部品
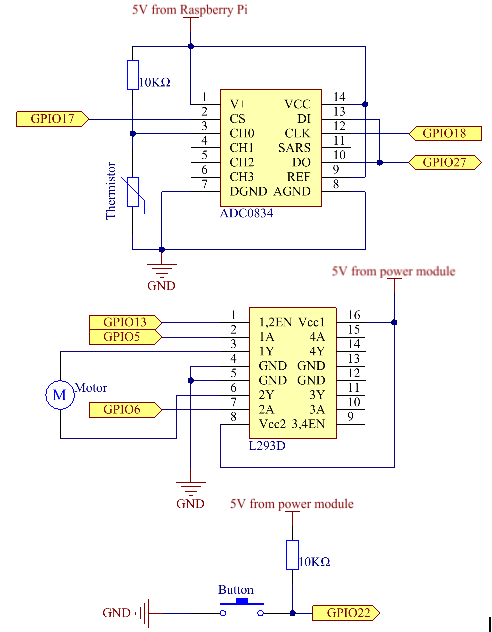
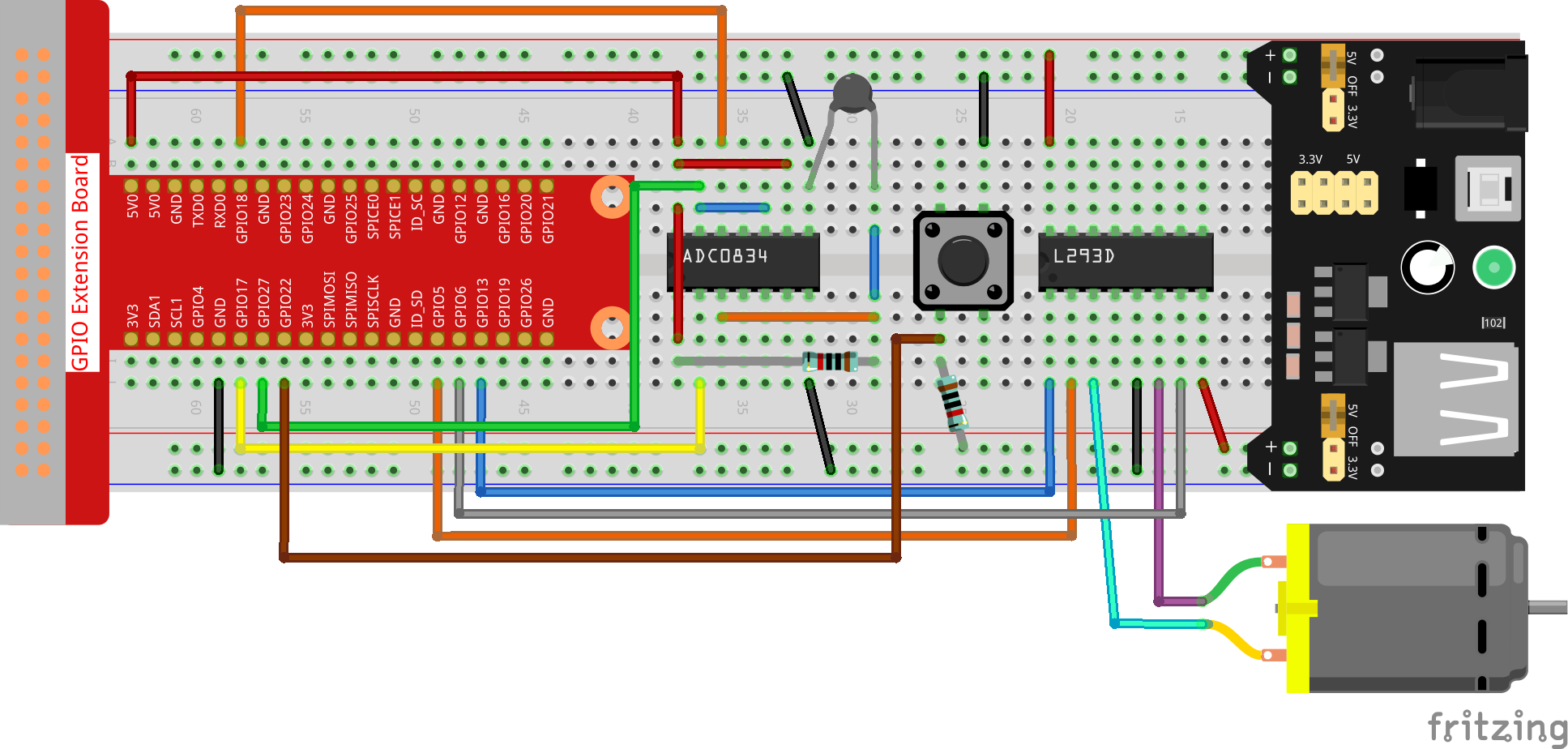
回路図
T-Board Name |
physical |
wiringPi |
BCM |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
GPIO5 |
Pin 29 |
21 |
5 |
GPIO6 |
Pin 31 |
22 |
6 |
GPIO13 |
Pin 33 |
23 |
13 |
実験手順
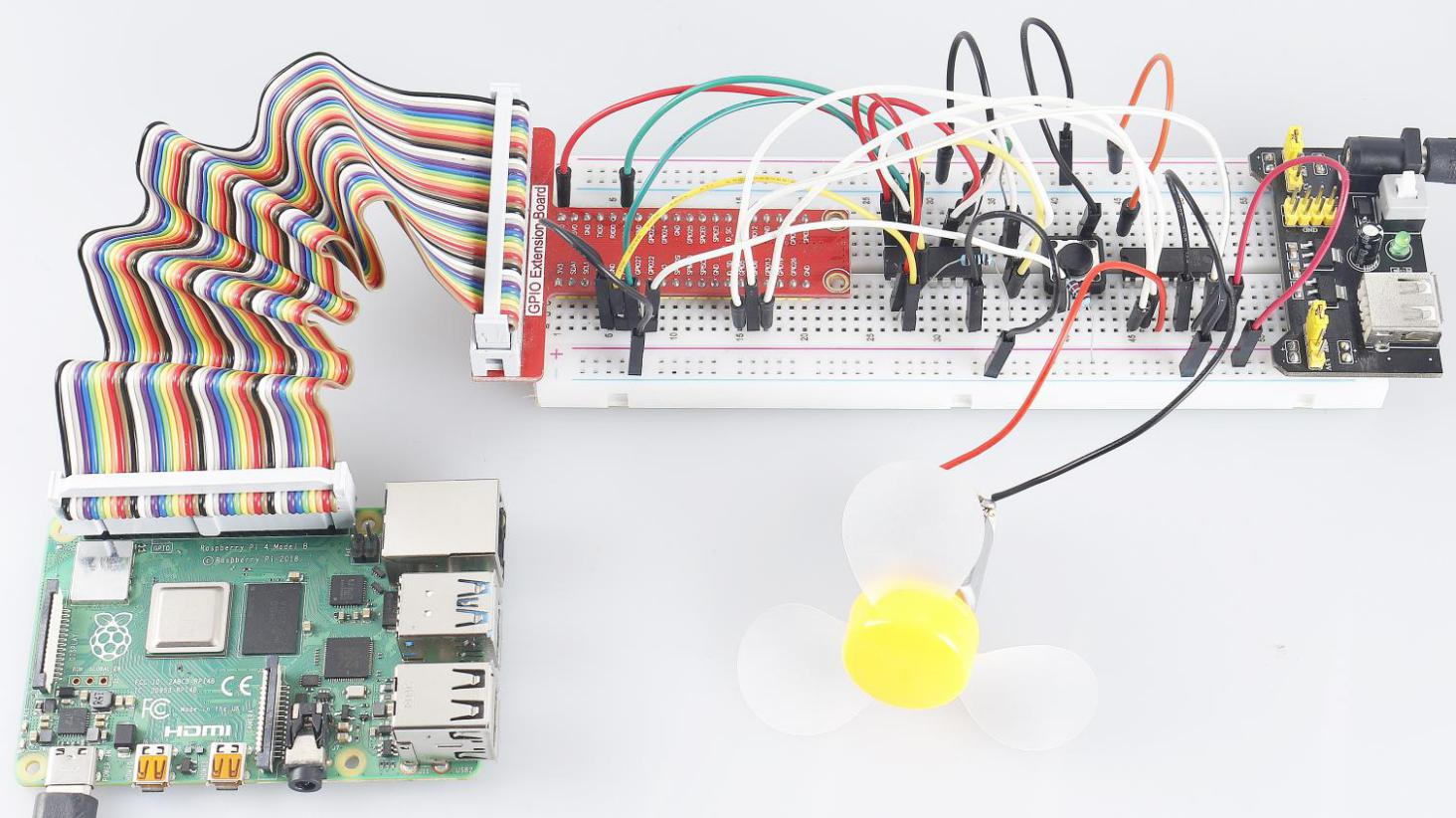
ステップ1: 回路を作る。
注釈
電源モジュールはキットの9Vバッテリーバックルで9Vバッテリーを適用できる。 電源モジュールのジャンパキャップをブレッドボードの5Vバスストリップに挿入する。

C言語ユーザー向け
ステップ2: コードのフォルダーに入る。
cd ~/davinci-kit-for-raspberry-pi/c/3.1.4/
ステップ3: コンパイルする。
gcc 3.1.4_SmartFan.c -lwiringPi -lm
ステップ4: EXEファイルを実行する。
sudo ./a.out
コードが実行された後、ボタンを押してファンを起動する。 押すたびに、1つのレベルが上下に調整される。5 種類のレベルがある:0〜4。 4番目のレベルに設定してボタンを押すと、ファンの風速が 0 で動作が停止する。
温度が2℃以上上昇または下降すると、速度は自動的に1グレード速くまたは遅くなる。
コードの説明
int temperture(){
unsigned char analogVal;
double Vr, Rt, temp, cel, Fah;
analogVal = get_ADC_Result(0);
Vr = 5 * (double)(analogVal) / 255;
Rt = 10000 * (double)(Vr) / (5 - (double)(Vr));
temp = 1 / (((log(Rt/10000)) / 3950)+(1 / (273.15 + 25)));
cel = temp - 273.15;
Fah = cel * 1.8 +32;
int t=cel;
return t;
}
Temperature() は、ADC0834によって読み取られたサーミスタ値を温度値に変換することによって機能します。 詳細については、 2.2.2 サーミスタ を参照してください。
int motor(int level){
if(level==0){
digitalWrite(MotorEnable,LOW);
return 0;
}
if (level>=4){
level =4;
}
digitalWrite(MotorEnable,HIGH);
softPwmWrite(MotorPin1, level*25);
return level;
}
この機能は、モーターの回転速度を制御する。 レベル の範囲:0〜4 (レベル 0 は動作中のモーターを停止する)。 1つのレベル調整は風速の 25% の変化を表す。
int main(void)
{
setup();
int currentState,lastState=0;
int level = 0;
int currentTemp,markTemp=0;
while(1){
currentState=digitalRead(BtnPin);
currentTemp=temperture();
if (currentTemp<=0){continue;}
if (currentState==1&&lastState==0){
level=(level+1)%5;
markTemp=currentTemp;
delay(500);
}
lastState=currentState;
if (level!=0){
if (currentTemp-markTemp<=-2){
level=level-1;
markTemp=currentTemp;
}
if (currentTemp-markTemp>=2){
level=level+1;
markTemp=currentTemp;
}
}
level=motor(level);
}
return 0;
}
関数 main() 上 には、次のようにプログラムプロセス全体が含まれている:
ボタンの状態と現在の温度を常に読み取る。
ボタンを押すごとに、レベル+1 になり、同時に温度が更新される。レ れベル 範囲 1〜4 。
ファンが作動すると(レベルは 0ではない )、温度は検出中である。2℃+ 以上変更すると、レベルが上下に変化する。
モーターは レベル に応じて回転速度を変更する。
Python言語ユーザー向け
ステップ2: コードのフォルダーに入る。
cd ~/davinci-kit-for-raspberry-pi/python
ステップ3: 実行する。
sudo python3 3.1.4_SmartFan.py
コードが実行された後、ボタンを押してファンを起動する。 押すたびに、1つのレベルが上下に調整される。5 種類のレベルがある:0〜4。 4番目のレベルに設定してボタンを押すと、ファンの風速が 0 で動作が停止する。
温度が2℃以上上昇または下降すると、速度は自動的に1グレード速くまたは遅くなる。
コード
注釈
以下のコードを 変更/リセット/コピー/実行/停止 できます。 ただし、その前に、 davinci-kit-for-raspberry-pi/python のようなソースコードパスに移動する必要があります。
import RPi.GPIO as GPIO
import time
import ADC0834
import math
# Set up pins
MotorPin1 = 5
MotorPin2 = 6
MotorEnable = 13
BtnPin = 22
def setup():
global p_M1,p_M2
ADC0834.setup()
GPIO.setmode(GPIO.BCM)
GPIO.setup(MotorPin1, GPIO.OUT)
GPIO.setup(MotorPin2, GPIO.OUT)
p_M1=GPIO.PWM(MotorPin1,2000)
p_M2=GPIO.PWM(MotorPin2,2000)
p_M1.start(0)
p_M2.start(0)
GPIO.setup(MotorEnable, GPIO.OUT, initial=GPIO.LOW)
GPIO.setup(BtnPin, GPIO.IN)
def temperature():
analogVal = ADC0834.getResult()
Vr = 5 * float(analogVal) / 255
Rt = 10000 * Vr / (5 - Vr)
temp = 1/(((math.log(Rt / 10000)) / 3950) + (1 / (273.15+25)))
Cel = temp - 273.15
Fah = Cel * 1.8 + 32
return Cel
def motor(level):
if level == 0:
GPIO.output(MotorEnable, GPIO.LOW)
return 0
if level>=4:
level = 4
GPIO.output(MotorEnable, GPIO.HIGH)
p_M1.ChangeDutyCycle(level*25)
return level
def main():
lastState=0
level=0
markTemp = temperature()
while True:
currentState =GPIO.input(BtnPin)
currentTemp=temperature()
if currentState == 1 and lastState == 0:
level=(level+1)%5
markTemp = currentTemp
time.sleep(0.5)
lastState=currentState
if level!=0:
if currentTemp-markTemp <= -2:
level = level -1
markTemp=currentTemp
if currentTemp-markTemp >= 2:
level = level +1
markTemp=currentTemp
level = motor(level)
def destroy():
GPIO.output(MotorEnable, GPIO.LOW)
p_M1.stop()
p_M2.stop()
GPIO.cleanup()
if __name__ == '__main__':
setup()
try:
main()
except KeyboardInterrupt:
destroy()
コードの説明
def temperature():
analogVal = ADC0834.getResult()
Vr = 5 * float(analogVal) / 255
Rt = 10000 * Vr / (5 - Vr)
temp = 1/(((math.log(Rt / 10000)) / 3950) + (1 / (273.15+25)))
Cel = temp - 273.15
Fah = Cel * 1.8 + 32
return Cel
Temperature() は、ADC0834 によって読み取られたサーミスタ値を温度値に変換することによって機能します。 詳細については、 2.2.2 サーミスタ を参照してください。
def motor(level):
if level == 0:
GPIO.output(MotorEnable, GPIO.LOW)
return 0
if level>=4:
level = 4
GPIO.output(MotorEnable, GPIO.HIGH)
p_M1.ChangeDutyCycle(level*25)
return level
この機能はモーターの回転速度を制御する。 レバー の範囲: 0〜4 (レベル 0 は動作中のモーターを停止する)。 1つのレベル調整は風速の 25% の変化を表す。
def main():
lastState=0
level=0
markTemp = temperature()
while True:
currentState =GPIO.input(BtnPin)
currentTemp=temperature()
if currentState == 1 and lastState == 0:
level=(level+1)%5
markTemp = currentTemp
time.sleep(0.5)
lastState=currentState
if level!=0:
if currentTemp-markTemp <= -2:
level = level -1
markTemp=currentTemp
if currentTemp-markTemp >= 2:
level = level +1
markTemp=currentTemp
level = motor(level)
関数 main() 上 には、次のようにプログラムプロセス全体が含まれている:
ボタンの状態と現在の温度を常に読み取る。
ボタンを押すごとに、レベル+1 になり、同時に温度が更新される。レ れベル 範囲 1〜4 。
ファンが作動すると(レベルは 0ではない )、温度は検出中である。2℃+ 以上変更すると、レベルが上下に変化する。
モーターは レベル に応じて回転速度を変更する。
現象画像