注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
3.1.6 モーション制御
前書き
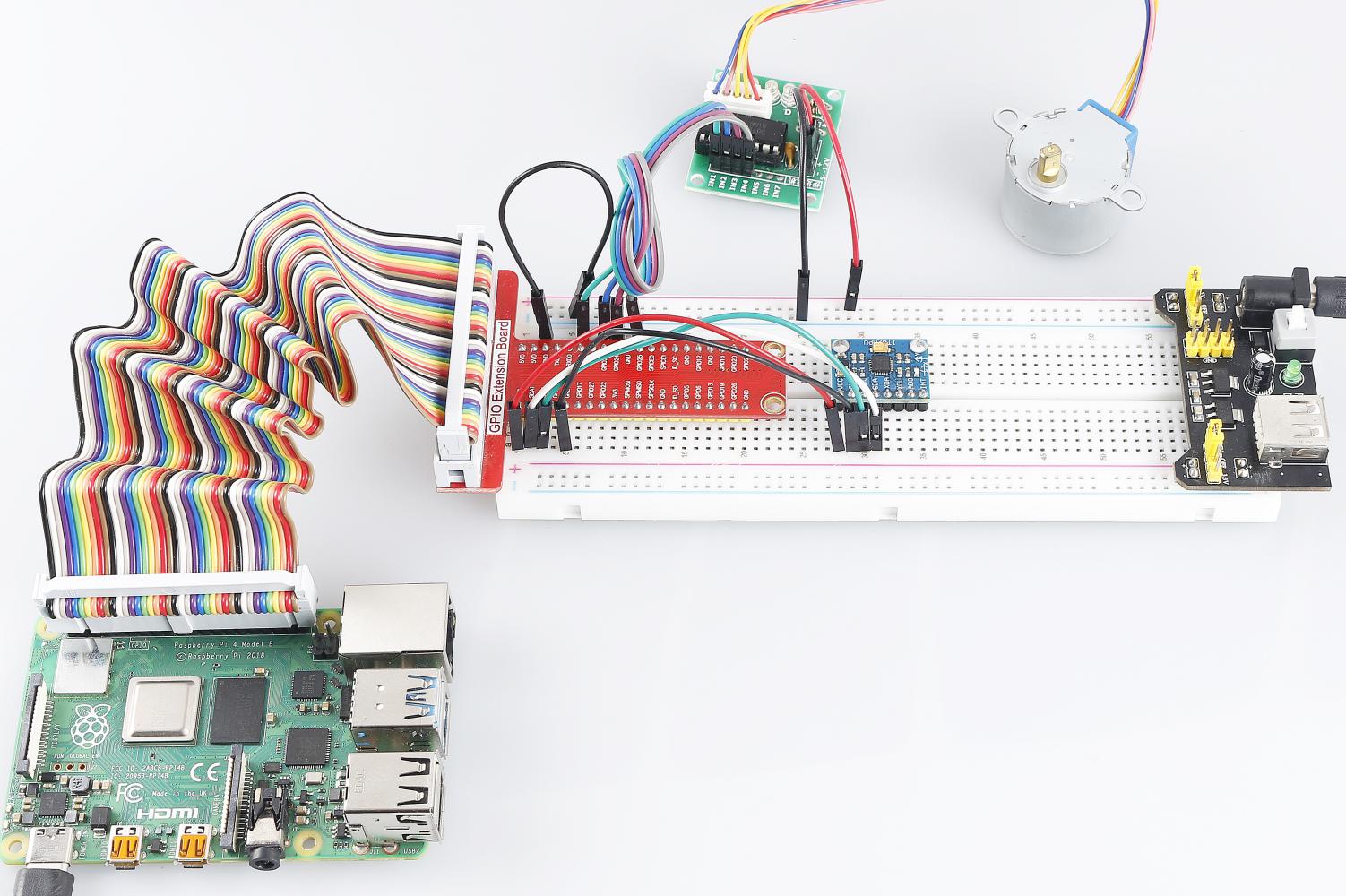
このレッスンでは、簡単なモーション検知と制御装置を作成する。 MPU6050はセンサーとして使用され、ステッピングモーターは制御装置として使用される。 MPU6050をグローブに取り付けた状態で、手首を回すことでステッピングモーターを制御できる。
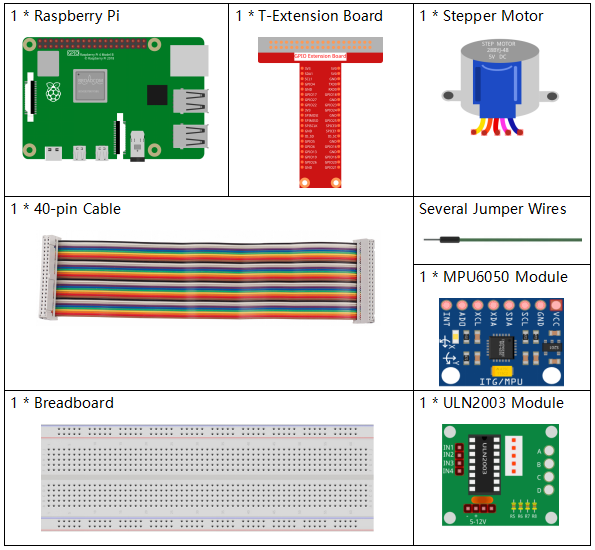
部品
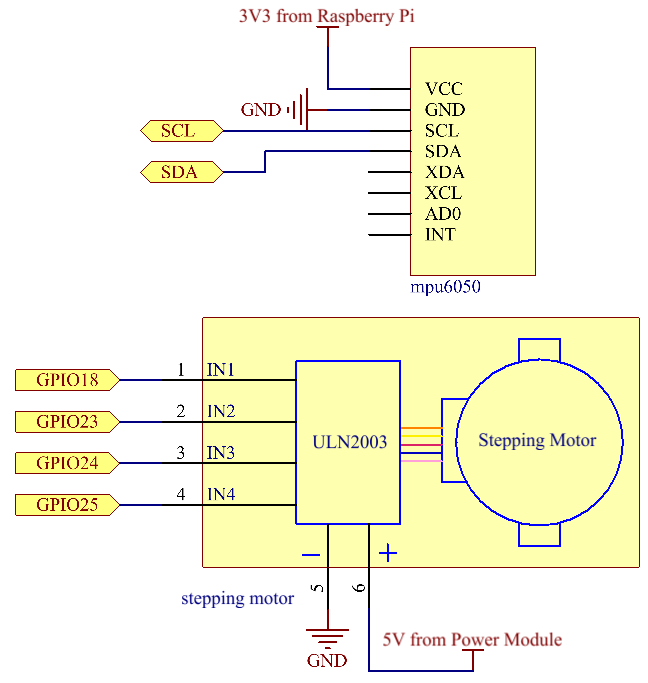
回路図
T-Board Name |
physical |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
GPIO25 |
Pin 22 |
6 |
25 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
実験手順
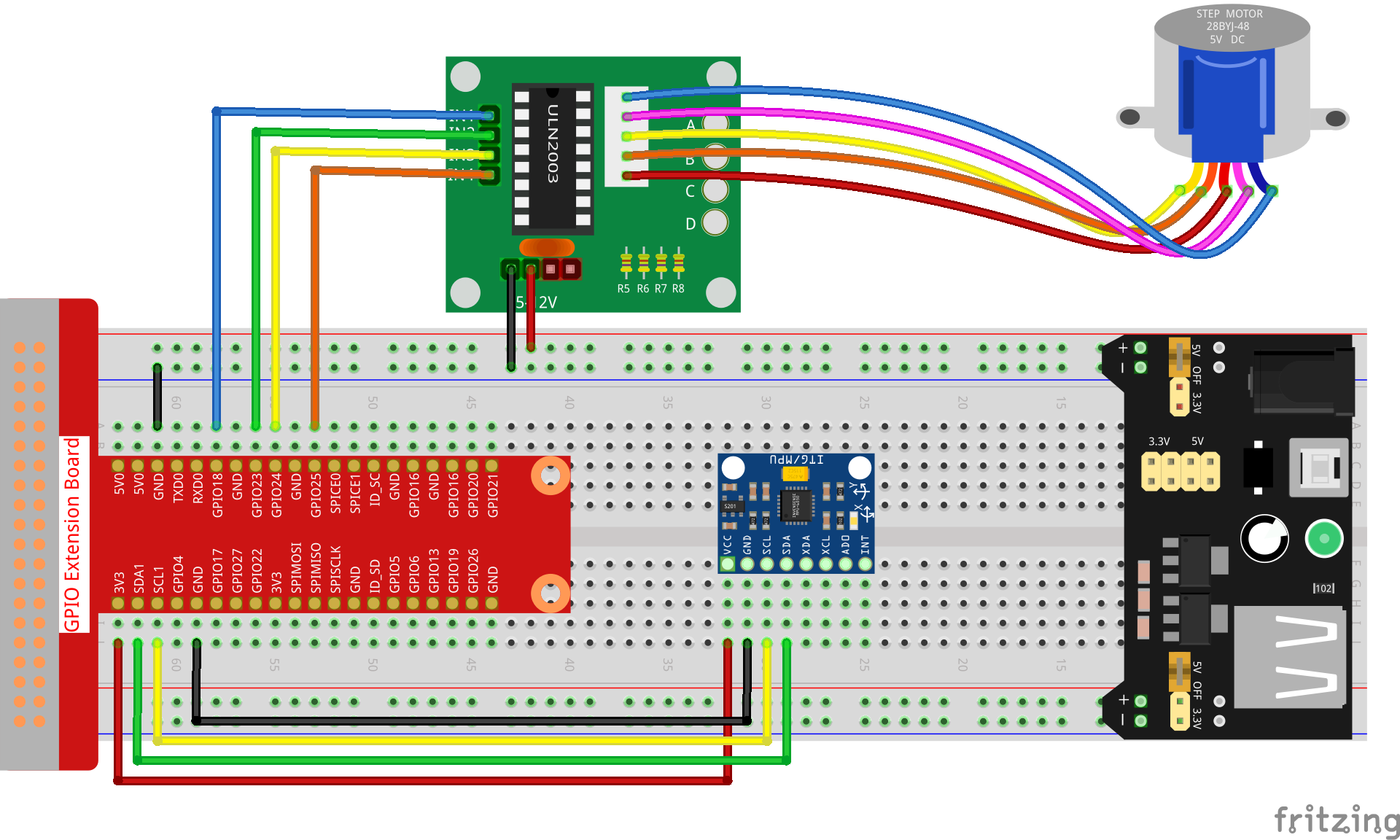
ステップ1: 回路を作る。
C言語ユーザー向け
ステップ2: コードのフォルダーに入る。
cd ~/davinci-kit-for-raspberry-pi/c/3.1.6/
ステップ3: コードをコンパイルする。
gcc 3.1.6_MotionControl.c -lwiringPi -lm
ステップ4: EXEファイルを実行する。
sudo ./a.out
コードが実行されている間、もし mpu6050 のチルト角度が Y-axis 45 ℃より大きい場合、 ステッピングモーターは反時計回りに回転します。 -45 ℃未満の場合、ステッピングモーターは時計回りに回転します。
コードの説明
double mpu6050(){
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
double angle=get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled);
return angle;
}
mpu6050はY軸の方向の傾斜角を取得する。
void rotary(char direction){
if(direction == 'c'){
for(int j=0;j<4;j++){
for(int i=0;i<4;i++)
{digitalWrite(motorPin[i],0x99>>j & (0x08>>i));}
delayMicroseconds(stepSpeed);
}
}
else if(direction =='a'){
for(int j=0;j<4;j++){
for(int i=0;i<4;i++)
{digitalWrite(motorPin[i],0x99<<j & (0x80>>i));}
delayMicroseconds(stepSpeed);
}
}
}
受信方向 キー が「c」の場合、ステッピングモーターは時計回りに回転します。 キー が「a 」の場合、 モーターは反時計回りに回転します。 ステッピングモーターの回転方向の計算の詳細については 1.3.3 ステッピングモーター を参照してください。
int main()
{
setup();
double angle;
while(1) {
angle = mpu6050();
if (angle >=45){rotary('a');}
else if (angle<=-45){rotary('c');}
}
return 0;
}
Y軸方向の傾斜角は mpu6050 から読み取られ、45 ℃より大きい場合、 ステッピングモーターは反時計回りに回転する。 -45 ℃未満の場合、ステッピングモーターは時計回りに回転する。
Python言語ユーザー向け
ステップ2: コードのフォルダーに入る。
cd ~/davinci-kit-for-raspberry-pi/python/
ステップ3: EXEファイルを実行する。
sudo python3 3.1.6_MotionControl.py
コードの実行中に、Y軸上の mpu6050 の傾斜角が 45℃ より大きい場合、 ステッピングモーターは反時計回りに回転する。 -45℃ 未満の場合、ステッピングモーターは時計回りに回転する。
コード
注釈
以下のコードを 変更/リセット/コピー/実行/停止 できます。 ただし、その前に、 davinci-kit-for-raspberry-pi/python のようなソースコードパスに移動する必要があります。
import RPi.GPIO as GPIO
import smbus
import math
import time
# Power management registers
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
bus = smbus.SMBus(1)
address = 0x68
bus.write_byte_data(address, power_mgmt_1, 0)
#Stepper motor pins
motorPin = (18,23,24,25)
rolePerMinute =15
stepsPerRevolution = 2048
stepSpeed = (60/rolePerMinute)/stepsPerRevolution
#mpu6050
def read_byte(adr):
return bus.read_byte_data(address, adr)
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low
return val
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
def mpu6050():
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
angle=get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
return angle
#Stepper Motor
def rotary(direction):
if(direction == 'c'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99>>j & (0x08>>i))
time.sleep(stepSpeed)
elif(direction == 'a'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99<<j & (0x80>>i))
time.sleep(stepSpeed)
def setup():
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
for i in motorPin:
GPIO.setup(i, GPIO.OUT)
def loop():
while True:
angle=mpu6050()
if angle >=45 :
rotary('a')
elif angle <=-45:
rotary('c')
def destroy():
GPIO.cleanup()
if __name__ == '__main__':
setup()
try:
loop()
except KeyboardInterrupt:
destroy()
コードの説明
def mpu6050():
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
angle=get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
return angle
mpu6050はY軸の方向の傾斜角を取得する。
def rotary(direction):
if(direction == 'c'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99>>j & (0x08>>i))
time.sleep(stepSpeed)
elif(direction == 'a'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99<<j & (0x80>>i))
time.sleep(stepSpeed)
受信方向 キー が「c」の場合、ステッピングモーターは時計回りに回転します。 キー が「a 」の場合、モーターは反時計回りに回転します。 ステッピングモーターの回転方向の計算の詳細については、 1.3.3 ステッピングモーター を参照してください。
def loop():
while True:
angle=mpu6050()
if angle >=45 :
rotary('a')
elif angle <=-45:
rotary('c')
mpu6050 から Y 軸方向の傾斜角を読み取り、45°C より大きい場合は、 rotary() を呼び出して、
ステッピング モーターを反時計回りに回転させます。
-45°C 未満の場合、ステッピング モーターは時計回りに回転します。
現象画像