Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Sonderrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [here] und treten Sie noch heute bei!
(Beispiel) Sprachgesteuerter Smart-Ventilator
Einführung
Dieses Projekt erstellt einen intelligenten sprachgesteuerten Smart-Ventilator, der Spracherkennung, AI-Verarbeitung und Motorsteuerung kombiniert. Das System ermöglicht es Benutzern, die Lüftergeschwindigkeit mit natürlichen Sprachbefehlen zu steuern, und bietet mehrere Steuerungsmethoden:
Sprachbefehle mithilfe von Speech-to-Text für freihändige Bedienung
Physische Taste zur manuellen Geschwindigkeitsanpassung
AI-Interpretation mit OpenAI GPT zum Verstehen natürlicher Sprache
Akustisches Feedback über einen Buzzer bei Tastendruck
Duale Steueroberfläche mit Unterstützung für Sprach- und physische Bedienung
Der Smart-Ventilator versteht Befehle wie „mach ihn schneller“, „bitte langsamer“ oder „schalte den Ventilator aus“ und reagiert mit passenden Aktionen sowie einer gesprochenen Bestätigung.
Sie können verschiedene Ein- und Ausgabemodule kombinieren, um sprachgesteuerte Smart-Geräte zu erstellen. Siehe:
Was Sie benötigen
Für dieses Projekt werden die folgenden Komponenten benötigt:
COMPONENT |
PURCHASE LINK |
|---|---|
- |
|
- |
|
Raspberry Pi |
- |
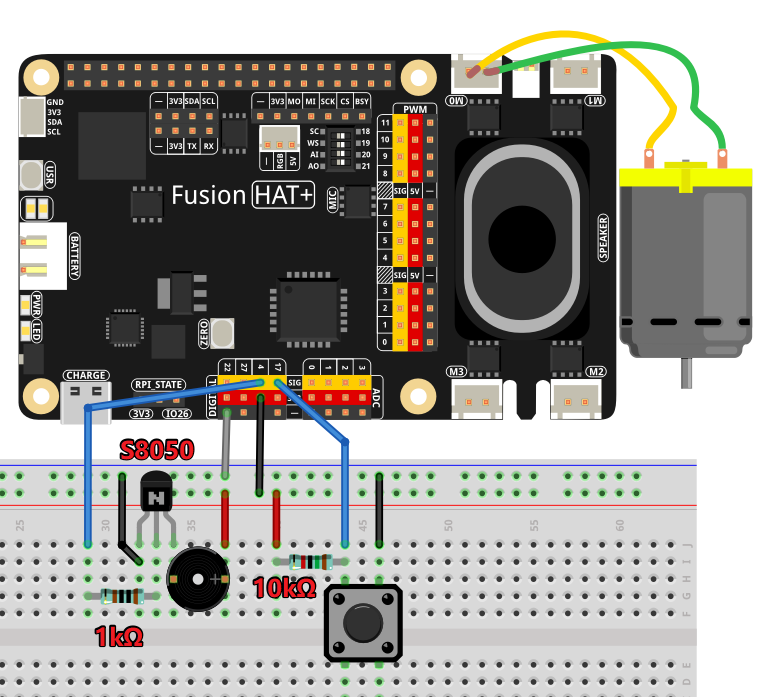
Schaltplan
Verbinden Sie die Komponenten wie folgt mit dem Fusion HAT+:
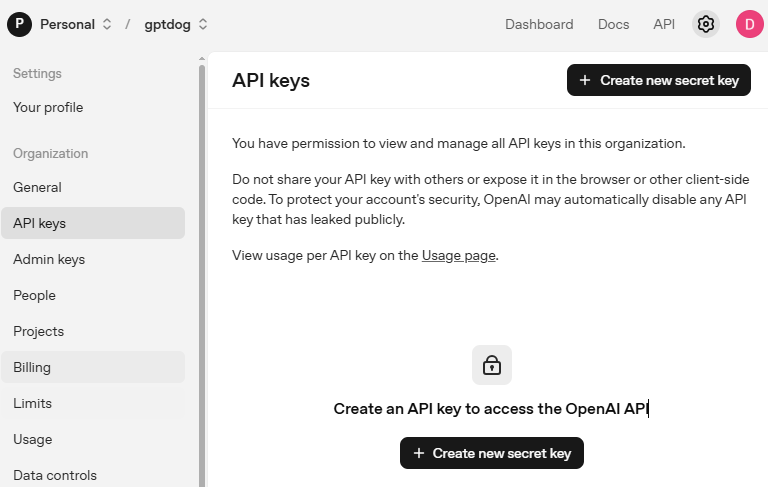
API-Schlüssel erstellen und speichern
Gehen Sie zu OpenAI Platform und melden Sie sich an. Klicken Sie auf der Seite API keys auf Create new secret key.
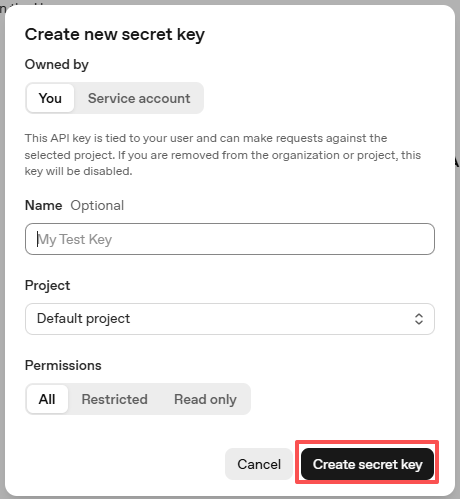
Füllen Sie die Angaben aus (Owner, Name, Project und gegebenenfalls Berechtigungen) und klicken Sie dann auf Create secret key.
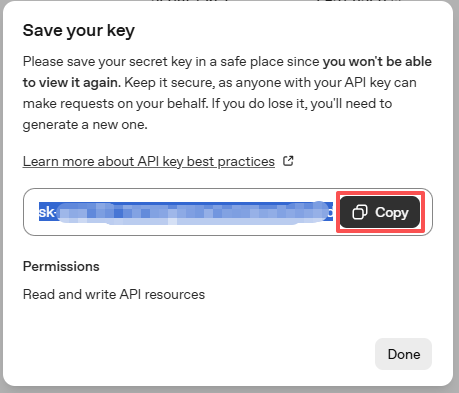
Sobald der Schlüssel erstellt wurde, kopieren Sie ihn sofort — später wird er nicht noch einmal angezeigt. Falls Sie ihn verlieren, müssen Sie einen neuen erstellen.
Erstellen Sie in Ihrem Projektordner (zum Beispiel:
/) eine Datei mit dem Namensecret.py:cd ~/ai-lab-kit/llm sudo nano secret.py
Fügen Sie Ihren Schlüssel wie folgt in die Datei ein:
# secret.py # Store secrets here. Never commit this file to Git. OPENAI_API_KEY = "sk-xxx"
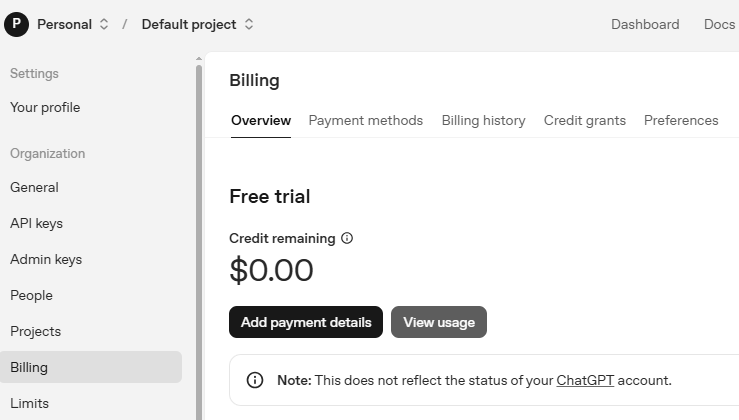
Abrechnung aktivieren und Modelle prüfen
Bevor Sie den Schlüssel verwenden, öffnen Sie in Ihrem OpenAI-Konto die Seite Billing, hinterlegen Sie Ihre Zahlungsdaten und laden Sie ein kleines Guthaben auf.
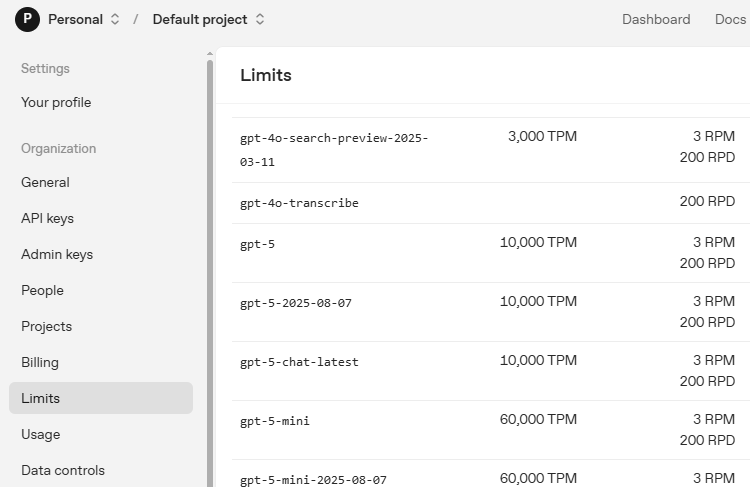
Wechseln Sie anschließend zur Seite Limits, um zu prüfen, welche Modelle für Ihr Konto verfügbar sind, und kopieren Sie die genaue Modell-ID für die Verwendung im Code.
Beispiel ausführen
Code ausführen
cd ~/ai-lab-kit/llm sudo python3 llm_openai_fan.py
Den Ventilator steuern
Sie können den Ventilator mit Sprachbefehlen, der Taste oder über natürliche Sprache steuern.
Sprachbefehle:
„Mach ihn schneller“ / „Geschwindigkeit erhöhen“ → Setzt die Geschwindigkeit auf maximal (100 %)
„Langsamer“ / „Geschwindigkeit verringern“ → Setzt die Geschwindigkeit auf niedrig (25 %)
„Bitte mittlere Geschwindigkeit“ → Setzt die Geschwindigkeit auf mittel (50 %)
„Ausschalten“ / „Stopp“ → Stoppt den Motor (0 %)
„Wie hoch ist die aktuelle Geschwindigkeit?“ → Gibt die aktuelle Geschwindigkeit aus
„Mach es kühler“ → Wird als Wunsch nach höherer Geschwindigkeit interpretiert
Tastensteuerung:
Jeder Tastendruck erhöht die Geschwindigkeit um 10 %
Bei 100 % springt der nächste Tastendruck wieder auf 0 %
Ein akustisches Signal bestätigt jeden Tastendruck
Die aktuelle Geschwindigkeit in Prozent wird auf dem Bildschirm angezeigt
Verarbeitung natürlicher Sprache:
Die AI versteht auch Varianten wie:
„Mir ist heiß, kannst du ihn schneller machen?“
„Könntest du den Ventilator bitte etwas herunterregeln?“
„Hier drin ist es zu windig!“
„Stell ihn auf halbe Geschwindigkeit“
Code
Hier ist das vollständige Python-Skript für den sprachgesteuerten Smart-Ventilator:
from fusion_hat.llm import OpenAI
from secret import OPENAI_API_KEY
from fusion_hat.motor import Motor
from fusion_hat.modules import Buzzer
from fusion_hat.pin import Pin
import random, time
from fusion_hat.stt import STT
# Initialize Speech-to-Text with English language
stt = STT(language="en-us")
# Initialize motor on port M0
motor = Motor('M0')
# Initialize button on GPIO 17 with pull-up and debounce
button = Pin(17, mode=Pin.IN, pull=Pin.PULL_UP, bounce_time=0.05)
# Initialize buzzer on GPIO 4
buzzer = Buzzer(Pin(4))
# Global speed variable (0-100%)
speed = 0
# Function for auditory feedback
def beep():
buzzer.on()
time.sleep(0.1)
buzzer.off()
# Debounce variables for button
last_triggered = 0
# Button callback function
def speed_up():
global speed, last_triggered
# Debounce: ignore if pressed within 500ms
if time.time() - last_triggered < 0.5:
return
last_triggered = time.time()
# Increase speed by 10%
speed += 10
# Wrap around at 100% (go back to 0)
if speed > 100:
motor.stop()
speed = 0
else:
motor.power(speed)
# Auditory feedback
beep()
# Print current speed
print(f"Speed set to: {speed}%")
# Attach callback to button
button.when_activated = speed_up
# Function to parse natural language response and set appropriate speed
def parse_response_for_speed(text_response):
"""
Parse the LLM's natural language response to determine speed setting.
Looks for keywords related to different speed levels.
Returns the speed level to set (100, 50, 25, or 0)
"""
text_lower = text_response.lower()
# Check for "stop" or "off" keywords - highest priority
if any(word in text_lower for word in ['stop', 'off', 'zero', '0%', 'turn off', 'shut off', 'halt']):
return 0
# Check for "slow" or "low" keywords
if any(word in text_lower for word in ['slow', 'low', '25%', 'quarter', 'minimum', 'gentle']):
return 25
# Check for "medium" or "half" keywords
if any(word in text_lower for word in ['medium', 'half', '50%', 'moderate', 'normal']):
return 50
# Check for "fast" or "high" or "full" keywords
if any(word in text_lower for word in ['fast', 'high', 'full', '100%', 'maximum', 'top']):
return 100
# If no specific keywords found, return -1 to indicate no speed change
return -1
# Setup LLM with specific instructions for fan control
INSTRUCTIONS = '''
You are a fan control assistant. Your task is to interpret the user's speech input and respond with natural language.
### Input Format:
The user will speak their command for fan control.
### CRITICAL RULES:
1. **BE DECISIVE**: Always take clear action based on user requests. Do NOT ask follow-up questions.
2. **NO CLARIFICATION QUESTIONS**: Never ask "Would you like me to..." or "Should I..." questions.
3. **ASSUME INTENT**: If the user's request is ambiguous, make a reasonable assumption and take action.
4. **CONFIRM ACTION**: Always state what action you are taking in your response.
### Response Guidelines:
1. Respond naturally and conversationally to the user's request.
2. Acknowledge what the user asked for.
3. Use clear language about what action you're taking.
4. Use keywords in your response that indicate speed levels:
- For maximum speed: use words like "fast", "high", "full speed", "maximum"
- For medium speed: use words like "medium", "half speed", "50%"
- For low speed: use words like "slow", "low", "quarter speed", "25%"
- For stopping: use words like "stop", "off", "zero", "turning off"
5. If the user asks about current status, respond with helpful information.
### Example Responses:
**When asked to go fast:**
"I'll set the fan to maximum speed for you. Full speed activated!"
**When asked to slow down:**
"Reducing the fan speed to low. Enjoy the gentle breeze."
**When asked for medium speed:**
"Setting the fan to medium speed. This should be comfortable."
**When asked to stop:**
"Stopping the fan now. The motor is turned off."
**When asked about status:**
"Your fan is currently at 50% speed. Would you like me to adjust it?"
'''
WELCOME = "Hello, I am a fan control assistant. You can ask me to set the fan to fast, medium, slow, or stop it completely. You can also press the button to increase the speed by 10% or decrease it by 10%. If you ask about the current status, I will tell you the current speed. If you don't know what to do, you can ask me for instructions. Good luck!"
# Initialize OpenAI LLM
llm = OpenAI(
api_key=OPENAI_API_KEY,
model="gpt-4o",
)
# Set how many messages to keep
llm.set_max_messages(20)
# Set instructions
llm.set_instructions(INSTRUCTIONS)
# Set welcome message
llm.set_welcome(WELCOME)
print(WELCOME)
# Main loop for voice control
while True:
print("Say something")
# Listen for speech input
for result in stt.listen(stream=True):
if result["done"]:
# Print final recognized text
print(f"\r\x1b[Kfinal: {result['final']}")
# Get the recognized speech
input_text = result['final']
# Add current speed context to the input
contextual_input = f"Current speed is {speed}%. User says: {input_text}"
# Get response from LLM
response = llm.prompt(contextual_input, stream=True)
# Collect the full response
full_response = ""
for next_word in response:
if next_word:
print(next_word, end="", flush=True)
full_response += next_word
print("\n") # Add newline after response
# Parse the response to determine speed setting
new_speed = parse_response_for_speed(full_response)
# Apply speed change if detected
if new_speed >= 0:
speed = new_speed
motor.power(speed)
print(f"Speed set to: {speed}%")
else:
print("No speed change detected in response")
else:
# Print partial recognition results
print(f"\r\x1b[Kpartial: {result['partial']}", end="", flush=True)
Code verstehen
Initialisierung von Speech-to-Text
Das System verwendet STT (Speech-to-Text) zur Spracherkennung:
stt = STT(language="en-us") for result in stt.listen(stream=True): if result["done"]: input_text = result['final'] else: print(f"partial: {result['partial']}")
Dadurch wird eine Spracherkennung in Echtzeit mit Teilergebnissen während des Sprechens ermöglicht.
Einrichtung der Motorsteuerung
Der Lüftermotor wird per PWM über Port M0 gesteuert:
motor = Motor('M0') # Geschwindigkeit als Prozentwert setzen (0-100) motor.power(speed) # Motor vollständig stoppen motor.stop()
Taster mit Entprellung
Der Taster verwendet eine Entprellung, um Mehrfachauslösungen zu verhindern:
button = Pin(17, mode=Pin.IN, pull=Pin.PULL_UP, bounce_time=0.05) last_triggered = 0 def speed_up(): global speed, last_triggered if time.time() - last_triggered < 0.5: # 500 ms Entprellung return last_triggered = time.time()
Akustisches Feedback
Ein Buzzer gibt eine akustische Bestätigung:
buzzer = Buzzer(Pin(4)) def beep(): buzzer.on() time.sleep(0.1) buzzer.off()
Funktion zum Parsen von Schlüsselwörtern
Das System analysiert AI-Antworten auf Geschwindigkeitsbefehle:
def parse_response_for_speed(text_response): text_lower = text_response.lower() # Auf Schlüsselwörter wie "stop" oder "off" prüfen if any(word in text_lower for word in ['stop', 'off', 'zero']): return 0 # Auf Schlüsselwörter wie "slow" oder "low" prüfen if any(word in text_lower for word in ['slow', 'low', '25%']): return 25 # Ähnliche Prüfungen für medium und fast return -1 # Keine Geschwindigkeitsänderung
Kontextbezogene Eingabe an die AI
Die aktuelle Geschwindigkeit wird in den Prompt aufgenommen, damit die AI kontextbezogen reagieren kann:
contextual_input = f"Current speed is {speed}%. User says: {input_text}" response = llm.prompt(contextual_input, stream=True)
Verarbeitung gestreamter Antworten
AI-Antworten werden Wort für Wort verarbeitet:
full_response = "" for next_word in response: if next_word: print(next_word, end="", flush=True) full_response += next_word
Doppelte Steuerlogik
Das System unterstützt sowohl Sprach- als auch Tastensteuerung:
# Sprachsteuerung in der Hauptschleife new_speed = parse_response_for_speed(full_response) if new_speed >= 0: speed = new_speed motor.power(speed) # Tastensteuerung per Callback def speed_up(): speed += 10 if speed > 100: speed = 0 motor.power(speed)
Saubere Terminalausgabe
Verwendet ANSI-Escape-Codes für eine übersichtliche Konsolenausgabe:
print(f"\r\x1b[Kpartial: {result['partial']}", end="", flush=True)
\r: Wagenrücklauf (zum Zeilenanfang springen)\x1b[K: Vom Cursor bis zum Zeilenende löschenend="": Kein Zeilenumbruchflush=True: Sofortige Ausgabe
Intelligente AI-Anweisungen
Die AI wird ausdrücklich angewiesen, entschlossen zu handeln und keine Rückfragen zur Klärung zu stellen:
INSTRUCTIONS = ''' CRITICAL RULES: 1. BE DECISIVE: Always take clear action based on user requests. 2. NO CLARIFICATION QUESTIONS: Never ask "Would you like me to..." questions. 3. ASSUME INTENT: If ambiguous, make reasonable assumption and take action. 4. CONFIRM ACTION: Always state what action you are taking. '''
Fehlerbehebung
Motor dreht sich nicht
Prüfen Sie die Motorverbindungen: M0-Port, richtige Polarität
Testen Sie den Motor direkt:
motor.power(50)sollte ihn mit 50 % drehen lassenStellen Sie sicher, dass die Variable
speedkorrekt gesetzt wird (Bereich 0-100)
Taster reagiert nicht
Prüfen Sie die Verkabelung: GPIO 17 zum Taster, andere Seite an 3.3V
Überprüfen Sie die Pull-up-Konfiguration
Testen Sie mit einem einfachen Skript: Ausgabe bei jeder Zustandsänderung des Tasters
Prüfen Sie die Entprellzeit (0.5 Sekunden könnten zu lang sein)
Kein Ton vom Buzzer
Testen Sie den Buzzer direkt:
buzzer.on()sollte einen Dauerton erzeugenPrüfen Sie, ob es sich um einen Piezo-Buzzer (benötigt PWM) oder einen aktiven Buzzer (funktioniert mit Gleichspannung) handelt
AI versteht die Befehle nicht
Prüfen Sie den API-Schlüssel in
secret.pyÜberprüfen Sie die Internetverbindung
Kontrollieren Sie die AI-Anweisungen und stellen Sie sicher, dass sie korrekt formatiert sind
Testen Sie zunächst mit einfacheren Befehlen
Geschwindigkeit ändert sich unerwartet
Prüfen Sie die Entprellung des Tasters: möglicherweise wird mehrfach ausgelöst
Überprüfen Sie das Schlüsselwort-Parsing: manche Formulierungen könnten unbeabsichtigt eine bestimmte Geschwindigkeit auslösen
Fügen Sie
print-Ausgaben hinzu, um Geschwindigkeitsänderungen nachzuverfolgen
Schlechte Genauigkeit bei der Spracherkennung
Reduzieren Sie Hintergrundgeräusche
Sprechen Sie deutlich und in mäßigem Tempo
Verwenden Sie gegebenenfalls ein externes USB-Mikrofon für bessere Qualität
Passen Sie, falls verfügbar, die STT-Parameter an
Motor macht Geräusche, dreht sich aber nicht
Prüfen Sie, ob der Motor blockiert oder festgeklemmt ist
Stellen Sie sicher, dass die Versorgungsspannung zu den Anforderungen des Motors passt
Manche Motoren benötigen einen Kondensator an den Anschlüssen für einen ruhigeren Lauf
Dieser sprachgesteuerte Ventilator zeigt, wie natürliche Sprachverarbeitung, physische Bedienelemente und intelligente Systeme kombiniert werden können, um intuitive und barrierearme Smart-Home-Geräte zu schaffen, die auf menschliche Bedürfnisse und Vorlieben reagieren.