Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie mit anderen Enthusiasten tiefer in Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und technische Herausforderungen mit Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu verbessern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und Sneak Peeks.
Sonderrabatte: Genießen Sie exklusive Rabatte auf unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Gewinnspielen und Feiertagsaktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [here] und treten Sie noch heute bei!
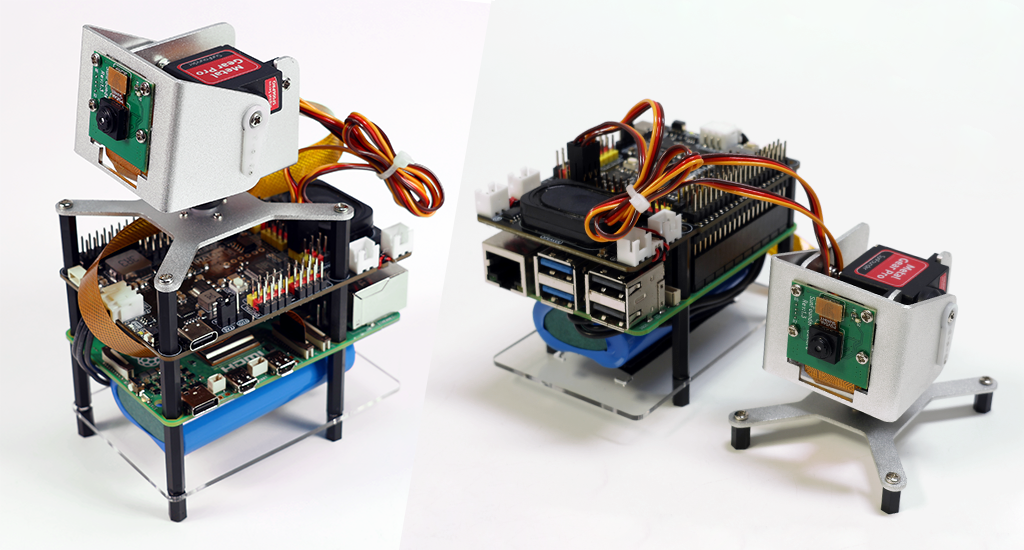
(Beispiel) Demo zur Hausaufgabenkorrektur mit Pan-Tilt-Kamera
Einführung
Dieses Projekt erstellt einen interaktiven AI-Hausaufgabenkorrektur-Assistenten, der Computer Vision, künstliche Intelligenz und Robotik kombiniert. Das System:
Erfasst Fotos von handschriftlichen oder gedruckten Hausaufgaben mit einer Raspberry-Pi-Kamera
Analysiert den Inhalt mit dem Vision-Modell GPT-4 von OpenAI, um zu bestimmen, ob die Antworten korrekt sind
Gibt physisches Feedback über servogesteuerte Pan-Tilt-Kopfbewegungen:
Nickt bei richtigen Antworten
Schüttelt den Kopf bei falschen Antworten
Verwendet eine einfache Interaktion, die durch einen einzigen Tastendruck ausgelöst wird
Diese Demo zeigt, wie AI mit der physischen Welt interagieren kann, und schafft so ein anschauliches Lernwerkzeug, das sofortiges visuelles Feedback zur Richtigkeit von Hausaufgaben gibt.
Sie können auch andere LLM-Module und Hardwarekomponenten verwenden, um eigene AI-gestützte Lernsysteme zu entwickeln. Siehe:
Was Sie benötigen
Für dieses Projekt werden die folgenden Komponenten benötigt:
COMPONENT |
PURCHASE LINK |
|---|---|
Pan-Tilt |
|
- |
|
Raspberry Pi |
- |
Hausaufgabenbeispiel (gedruckt oder handschriftlich) |
- |
Hardware-Einrichtung
Für eine komfortable Nutzung des Kameramoduls wird Pan-Tilt montieren (für die Kamera) empfohlen.
Bemerkung
Durch die Montage des Pan-Tilt-Moduls können einige Pins verdeckt werden. Daher wird empfohlen, es nur bei Verwendung der Kamera zu montieren oder es nach der Montage außen anzubringen.
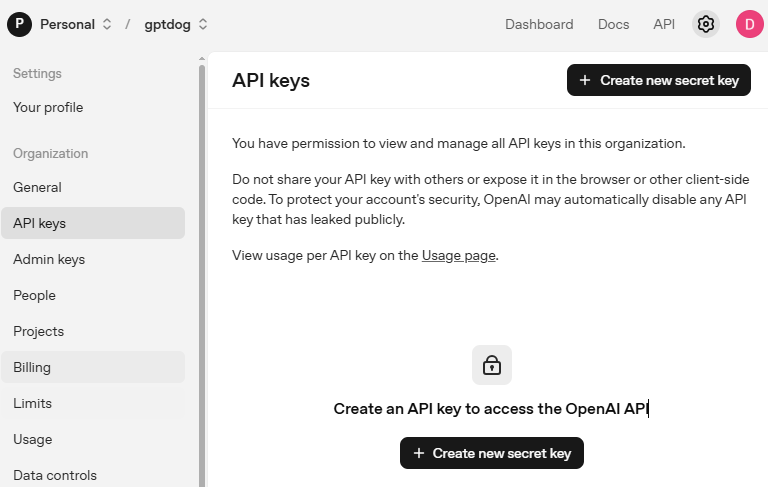
API-Schlüssel erstellen und speichern
Gehen Sie zu OpenAI Platform und melden Sie sich an. Klicken Sie auf der Seite API keys auf Create new secret key.
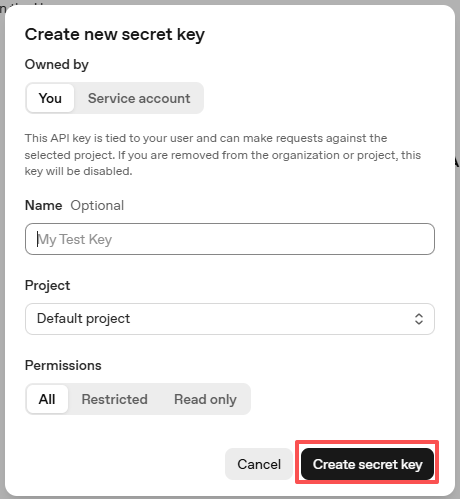
Füllen Sie die Angaben aus (Owner, Name, Project und gegebenenfalls Berechtigungen) und klicken Sie dann auf Create secret key.
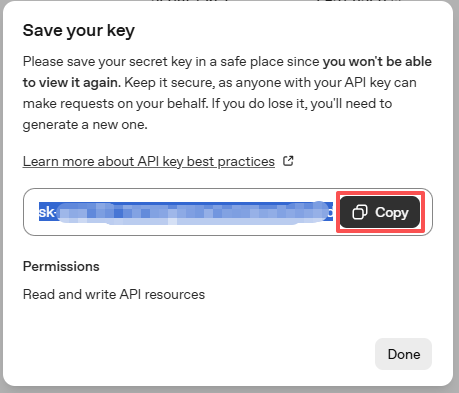
Sobald der Schlüssel erstellt wurde, kopieren Sie ihn sofort — später wird er nicht noch einmal angezeigt. Falls Sie ihn verlieren, müssen Sie einen neuen erstellen.
Erstellen Sie in Ihrem Projektordner (zum Beispiel:
/) eine Datei mit dem Namensecret.py:cd ~/ai-lab-kit/llm sudo nano secret.py
Fügen Sie Ihren Schlüssel wie folgt in die Datei ein:
# secret.py # Store secrets here. Never commit this file to Git. OPENAI_API_KEY = "sk-xxx"
Abrechnung aktivieren und Modelle prüfen
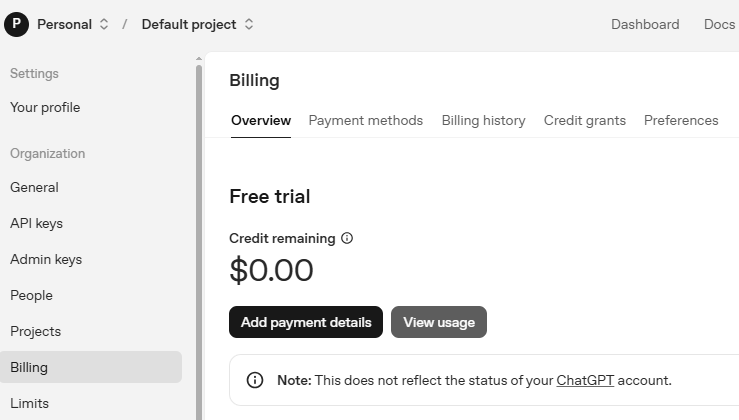
Bevor Sie den Schlüssel verwenden, öffnen Sie in Ihrem OpenAI-Konto die Seite Billing, hinterlegen Sie Ihre Zahlungsdaten und laden Sie ein kleines Guthaben auf.
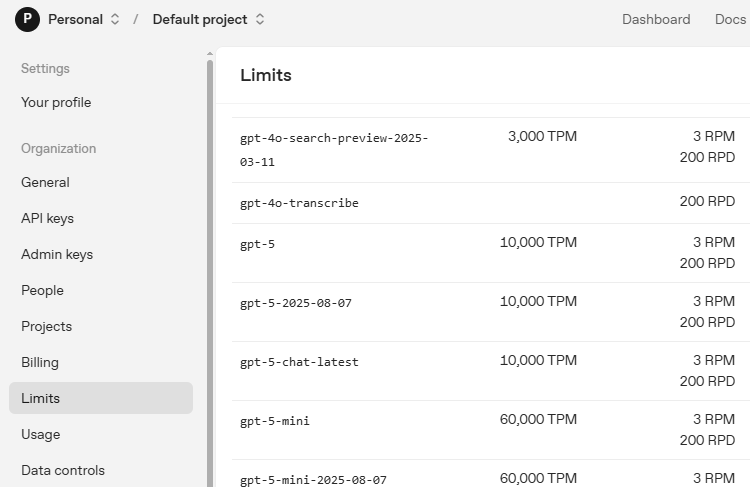
Wechseln Sie anschließend zur Seite Limits, um zu prüfen, welche Modelle für Ihr Konto verfügbar sind, und kopieren Sie die genaue Modell-ID für die Verwendung im Code.
Code ausführen
Hausaufgabenbeispiel erstellen:
Schreiben oder drucken Sie eine einfache Mathematikaufgabe mit Antwort
Beispiel: „5 + 3 = 8“ (richtig) oder „5 + 3 = 7“ (falsch)
Achten Sie auf gut lesbare Handschrift oder einen klaren Druck
Programm starten:
cd ~/ai-lab-kit/llm python3 llm_openai_homework.py
Anweisungen auf dem Bildschirm folgen:
Positionieren Sie die Hausaufgabe unter der Kamera
Drücken Sie die User-Taste (USR) auf dem Fusion HAT+
Beobachten Sie die Reaktion des Servos
Erwartete Ausgabe:
HOMEWORK GRADING DEMO ================================================== Instructions: 1. Place a homework question under the camera 2. Make sure the question AND answer are visible 3. Press the User Button (USR) on Fusion HAT to grade 4. The camera will take a photo 5. AI will grade the answer 6. Servo will nod (correct) or shake (incorrect) ================================================== Waiting for button press... ================================================== Button pressed - Starting grading process Taking photo... Photo captured Sending to AI for grading... AI response: CORRECT Answer is correct - nodding head ==================================================
Code
Hier ist das vollständige Python-Skript für die Demo zur Hausaufgabenkorrektur:
#!/usr/bin/env python3
"""
Homework Grading Demo with Pan-Tilt Camera
Press User Button to take photo, LLM grades, servo nods or shakes
"""
import time
from fusion_hat.llm import OpenAI
from fusion_hat.servo import Servo
from fusion_hat.user_button import UserButton
from picamera2 import Picamera2, Preview
# ========== LLM SETTINGS ==========
# Create a secret.py file with: OPENAI_API_KEY = "your-api-key-here"
try:
from secret import OPENAI_API_KEY
except ImportError:
print("ERROR: Please create a secret.py file with your OpenAI API key")
print("Example content: OPENAI_API_KEY = 'sk-...'")
exit()
# LLM instructions for grading
INSTRUCTIONS = """You are a homework grading assistant.
When you see a photo of a homework question with an answer,
determine if the answer is correct or incorrect.
Respond with ONLY ONE WORD:
- If the answer is CORRECT, respond: "CORRECT"
- If the answer is INCORRECT, respond: "INCORRECT"
Do not provide any other text, explanations, or justifications.
Only respond with "CORRECT" or "INCORRECT"."""
# Initialize LLM
llm = OpenAI(
api_key=OPENAI_API_KEY,
model="gpt-4o"
)
# Set LLM settings
llm.set_max_messages(5)
llm.set_instructions(INSTRUCTIONS)
# ========== HARDWARE SETTINGS ==========
PAN_CHANNEL = 2 # Horizontal servo for shaking head
TILT_CHANNEL = 3 # Vertical servo for nodding head
# Servo center positions
TILT_CENTER = 0 # Looking straight ahead
PAN_CENTER = 0 # Center position
# ========== INITIALIZE HARDWARE ==========
print("Initializing Homework Grading Demo...")
print("-" * 50)
# Initialize servos
pan_servo = Servo(PAN_CHANNEL)
tilt_servo = Servo(TILT_CHANNEL)
# Center servos
tilt_servo.angle(TILT_CENTER)
pan_servo.angle(PAN_CENTER)
time.sleep(1)
print("Servos ready")
# Initialize camera
camera = Picamera2()
camera_config = camera.create_preview_configuration(main={"size": (1280, 720)})
camera.configure(camera_config)
camera.start_preview(Preview.QT)
camera.start()
time.sleep(2)
print("Camera ready")
# Initialize user button
user_button = UserButton()
print("User button ready")
print("-" * 50)
# ========== SERVO MOVEMENT FUNCTIONS ==========
def nod_head():
"""
Nodding head movement for "correct"
"""
# Look down
tilt_servo.angle(15)
time.sleep(0.2)
# Look up
tilt_servo.angle(-10)
time.sleep(0.2)
# Return to center
tilt_servo.angle(TILT_CENTER)
def shake_head():
"""
Shaking head movement for "incorrect"
"""
# Look left
pan_servo.angle(-20)
time.sleep(0.15)
# Look right
pan_servo.angle(20)
time.sleep(0.15)
# Look left again
pan_servo.angle(-15)
time.sleep(0.15)
# Return to center
pan_servo.angle(PAN_CENTER)
# ========== GRADING FUNCTION ==========
def grade_homework():
"""
Main grading function: take photo, send to LLM, move servo
"""
print("\nTaking photo...")
# Capture image
img_path = './homework.jpg'
camera.capture_file(img_path)
print("Photo captured")
# Send to LLM for grading
print("Sending to AI for grading...")
prompt = "Look at this homework question and answer. Is the answer correct? Respond with only one word: 'CORRECT' or 'INCORRECT'."
response = llm.prompt(prompt, image_path=img_path)
response_text = response.strip().upper()
print(f"AI response: {response_text}")
# Move servo based on response
if "INCORRECT" in response_text:
print("Answer is incorrect - shaking head")
shake_head()
elif "CORRECT" in response_text:
print("Answer is correct - nodding head")
nod_head()
else:
print(f"Unexpected response: {response_text}")
# ========== BUTTON CALLBACK ==========
def on_button_click():
"""
Called when user button is pressed
"""
print("\n" + "=" * 50)
print("Button pressed - Starting grading process")
grade_homework()
print("=" * 50)
# ========== MAIN DEMO ==========
def main():
"""
Main demo function
"""
print("\nHOMEWORK GRADING DEMO")
print("=" * 50)
print("Instructions:")
print("1. Place a homework question under the camera")
print("2. Make sure the question AND answer are visible")
print("3. Press the User Button (USR) on Fusion HAT to grade")
print("4. The camera will take a photo")
print("5. AI will grade the answer")
print("6. Servo will nod (correct) or shake (incorrect)")
print("=" * 50)
print("\nWaiting for button press...")
# Set button callback
user_button.set_on_click(on_button_click)
# Keep program running
try:
while True:
time.sleep(0.1)
except KeyboardInterrupt:
print("\nDemo stopped by user")
# ========== CLEANUP ==========
def cleanup():
"""
Clean up resources
"""
print("\nCleaning up...")
# Return servos to center
tilt_servo.angle(TILT_CENTER)
pan_servo.angle(PAN_CENTER)
# Stop camera
camera.stop()
print("Demo ended")
# ========== RUN DEMO ==========
if __name__ == "__main__":
try:
main()
finally:
cleanup()
Code verstehen
LLM-Konfiguration und Einrichtung
Das System verwendet OpenAIs GPT-4o mit Vision-Funktionen zur Bildanalyse:
# LLM importieren und initialisieren from fusion_hat.llm import OpenAI llm = OpenAI(api_key=OPENAI_API_KEY, model="gpt-4o") # Spezifische Anweisungen für konsistente Antworten festlegen INSTRUCTIONS = """You are a homework grading assistant...""" llm.set_instructions(INSTRUCTIONS) # Gesprächsverlauf begrenzen, um Tokens zu sparen llm.set_max_messages(5)
Hardware-Initialisierung
Drei Hardwarekomponenten werden initialisiert: Servos, Kamera und Taste:
# Servosteuerung für das Pan-Tilt-System pan_servo = Servo(PAN_CHANNEL) # Kanal 2 für horizontale Bewegung tilt_servo = Servo(TILT_CHANNEL) # Kanal 3 für vertikale Bewegung # Kameraeinrichtung mit Vorschau camera = Picamera2() camera_config = camera.create_preview_configuration(main={"size": (1280, 720)}) camera.configure(camera_config) camera.start_preview(Preview.QT) camera.start() # User-Taste für Interaktion user_button = UserButton()
Servo-Animationsfunktionen
Natürlich wirkende Bewegungen zum Nicken und Kopfschütteln:
def nod_head(): """Kopf-Nicken für 'richtige' Antworten""" tilt_servo.angle(15) # Nach unten schauen time.sleep(0.2) tilt_servo.angle(-10) # Nach oben schauen time.sleep(0.2) tilt_servo.angle(TILT_CENTER) # Zurück zur Mitte def shake_head(): """Kopf-Schütteln für 'falsche' Antworten""" pan_servo.angle(-20) # Nach links schauen time.sleep(0.15) pan_servo.angle(20) # Nach rechts schauen time.sleep(0.15) pan_servo.angle(-15) # Noch einmal nach links time.sleep(0.15) pan_servo.angle(PAN_CENTER) # Zurück zur Mitte
Bildaufnahme und AI-Analyse
Der Hauptablauf für die Bewertung:
def grade_homework(): # Bild von der Kamera aufnehmen img_path = './homework.jpg' camera.capture_file(img_path) # Bild mit spezifischem Prompt an das LLM senden prompt = "Look at this homework question and answer..." response = llm.prompt(prompt, image_path=img_path) response_text = response.strip().upper() # Antwort interpretieren und entsprechende Servo-Bewegung auslösen if "INCORRECT" in response_text: shake_head() elif "CORRECT" in response_text: nod_head()
Ereignisbehandlung der Taste
Einfaches Callback-System für die Benutzerinteraktion:
def on_button_click(): print("Button pressed - Starting grading process") grade_homework() # Callback der Taste zuweisen user_button.set_on_click(on_button_click)
Hauptanwendungsschleife
Minimale Hauptschleife, die auf Tastendruck wartet:
def main(): print("Waiting for button press...") user_button.set_on_click(on_button_click) # Programm läuft weiter, bis es unterbrochen wird try: while True: time.sleep(0.1) # Warten mit geringer CPU-Auslastung except KeyboardInterrupt: print("\nDemo stopped by user")
Ressourcenbereinigung
Ordnungsgemäßes Herunterfahren:
def cleanup(): # Servos in Neutralposition zurücksetzen tilt_servo.angle(TILT_CENTER) pan_servo.angle(PAN_CENTER) # Kamera stoppen camera.stop()
Fehlerbehebung
Kein Modul namens
picamera2Installieren Sie die benötigte Bibliothek:
sudo apt update sudo apt install python3-picamera2
Kamera wird nicht erkannt
Kameraverbindung prüfen: sicherstellen, dass das Flachbandkabel korrekt eingesetzt ist
Kamera aktivieren:
sudo raspi-config→ Interface Options → CameraKamera separat testen:
libcamera-hello
Servos bewegen sich nicht
Stromversorgung prüfen: Servos benötigen 5V
Überprüfen, ob die Servo-Kanäle mit dem Code übereinstimmen (Kanäle 2 und 3)
Servos separat mit einfachen Winkelbefehlen testen
AI reagiert nicht oder gibt Fehler aus
Prüfen, ob der API-Schlüssel in
secret.pykorrekt istInternetverbindung testen:
ping 8.8.8.8Sicherstellen, dass Ihr OpenAI-Konto über Guthaben verfügt
Prüfen, ob das Modell „gpt-4o“ in Ihrem Konto verfügbar ist
Falsche Servo-Bewegungen
Prüfen, ob Pan- und Tilt-Servo vertauscht sind
Winkelwerte in
nod_head()undshake_head()anpassenServo-Mittelposition überprüfen (möglicherweise Kalibrierung erforderlich)
Bild zu unscharf oder zu dunkel
Für ausreichende Beleuchtung der Hausaufgabe sorgen
Kamerafokus einstellen (falls möglich)
Kamera etwa 15–30 cm über dem Papier positionieren
Für Handschrift einen gut sichtbaren Stift oder Marker verwenden
Taste reagiert nicht
Prüfen, ob die LED der User-Taste beim Drücken aufleuchtet
Sicherstellen, dass das Callback korrekt registriert ist
Taste mit einem einfachen
print-Testskript prüfen
AI liefert unerwartete Antworten
Prompt-Formatierung im Code überprüfen
Sicherstellen, dass im Bild sowohl Aufgabe als auch Antwort klar sichtbar sind
Zunächst sehr einfache Rechenaufgaben testen
Diese Demo zur Hausaufgabenkorrektur zeigt, wie AI-Vision-Modelle mit physischer Hardware interagieren können, um spannende Lernerfahrungen zu schaffen, bei denen digitale Intelligenz mit greifbarem Feedback kombiniert wird.