3.7 障害物回避 2¶
3.5 障害物回避 プロジェクトでは、2つのIR障害物回避モジュールのみが障害物回避のために使用されていましたが、IR障害物回避モジュールの検出距離は短く、車が障害物を避けるのが遅すぎることがあります。
このプロジェクトでは、遠距離検出のために超音波モジュールも追加します。これにより、車はより遠くの障害物を感知して判断を下すことができます。
必要な部品¶
このプロジェクトには、以下の部品が必要です。
キット全体を購入すると確実に便利です。こちらがリンクです:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
3 in 1 Starter Kit |
380+ |
以下のリンクから個別に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
- |
|
回路の作成¶
超音波モジュールと2つのIR障害物回避モジュールを同時に接続します。
超音波をR3ボードに次のように接続します。
超音波モジュール |
R3 ボード |
Vcc |
5V |
Trig |
3 |
Echo |
4 |
Gnd |
GND |
2つのIR障害物回避モジュールのR3ボードへの配線は次のとおりです。
左 IR モジュール |
R3 ボード |
OUT |
8 |
GND |
GND |
VCC |
5V |
右 IR モジュール |
R3 ボード |
OUT |
7 |
GND |
GND |
VCC |
5V |

プログラミング¶
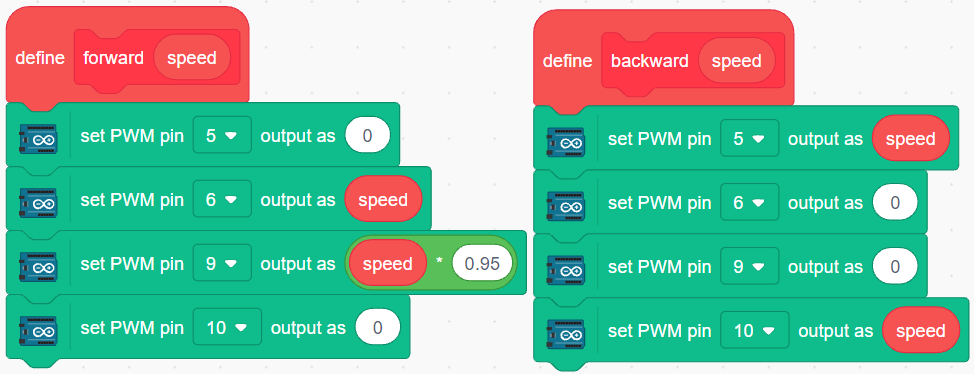
1. 関数を作成する
車を前後に動かします。
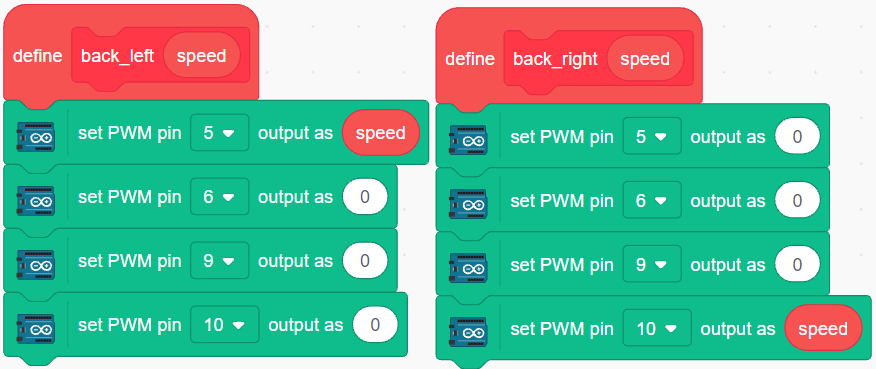
車を左後ろおよび右後ろに動かします。
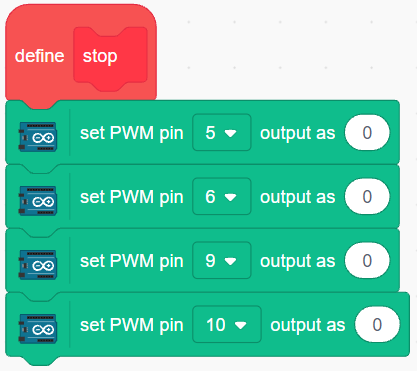
車を停止させます。
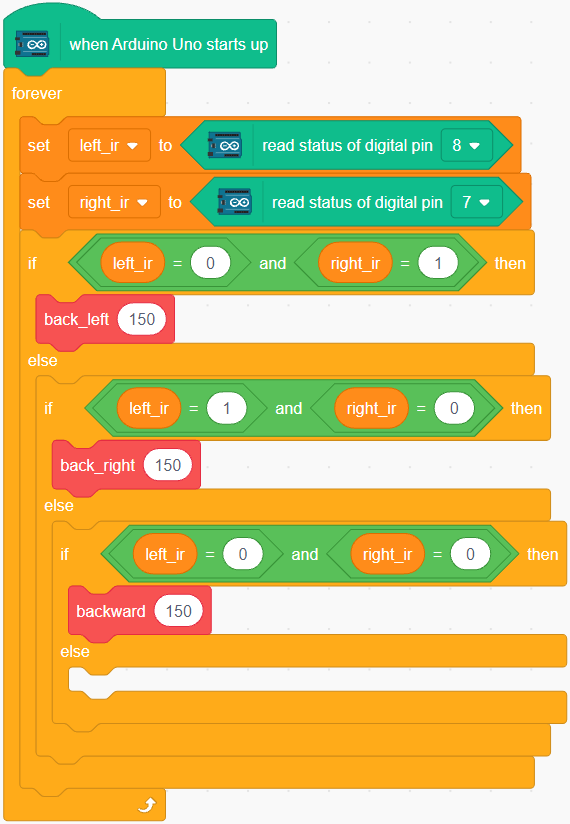
2. 緊急障害物回避
車の2つの赤外線障害物回避モジュールは、緊急障害物回避のために使用され、短距離、角度、または比較的小さな障害物での障害物を検出します。
左の赤外線モジュールが障害物を検出すると、車は左に後退します。
右のIRモジュールが障害物を検出すると、車は右後ろに後退します。
2つのモジュールが同時に障害物を検出すると、車は直接後ろに後退します。
3. 長距離障害物回避
超音波モジュールの値を読み取り、検出された値が10未満の場合、車は後退します。それ以外の場合は前進を続けます。
