3.2 動き¶
このプロジェクトは 3.1 車をテストする に基づいて車を全方向に移動させるものです。
プログラミングを始める前に、L298Nの動作原理を確認しましょう。
ENAとIN1、IN2の動作関係は以下の通りです。
ENA |
IN1 |
IN2 |
右モータ(A)の状態 |
|---|---|---|---|
0 |
X |
X |
停止 |
1 |
0 |
0 |
ブレーキ |
1 |
0 |
1 |
時計回りに回転 |
1 |
1 |
0 |
反時計回りに回転 |
1 |
1 |
1 |
ブレーキ |
ENBとIN3、IN4の動作関係は次の通りです。
ENB |
IN3 |
IN4 |
左モータ(B)の状態 |
|---|---|---|---|
0 |
X |
X |
停止 |
1 |
0 |
0 |
ブレーキ |
1 |
0 |
1 |
時計回りに回転 |
1 |
1 |
0 |
反時計回りに回転 |
1 |
1 |
1 |
ブレーキ |
プログラミング¶
次に、車が前進、後退、左右回転、及び停止するためのブロックを作成します。
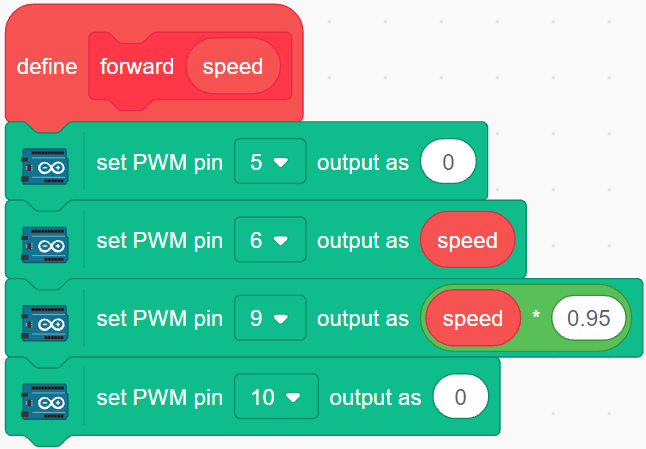
1. 前進
右モータは時計回り、左モータは反時計回りに回転して車を前進させます。
2. 後退
後退はその逆で、右モータは反時計回り、左モータは時計回りに回転が必要です。

3. 左に曲がる
左右のモータを同時に時計回りに回転させて車を左に曲がらせます。

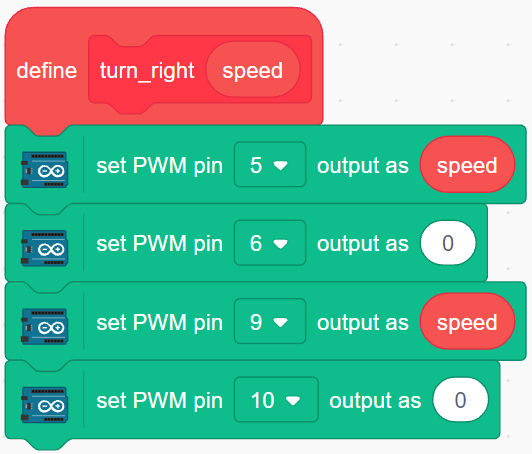
4. 右に曲がる
同様に、左右のモータを反時計回りに回転させて車を右に曲がらせます。
5. 停止
全モータの設定を0にして車を停止させます。

6. 車を動かす
車を前進、後退、左右に1秒間動かしてから停止します。すべてのブロックが[Forever]ブロック内に配置されているので、車が上記の動作を繰り返すのを見ることができます。
