注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
5.15 EEPROM¶
EEPROM はメモリであり、メインコントロールボードをオフにしてもその中のデータは消去されません。これを使用して、いくつかのデータを記録し、次回電源を入れたときにそれを読み取ることができます。
例として、毎日のジャンプロープの回数を記録するスポーツカウンタを作成することができます。
また、1つのプログラムでデータを書き込み、別のプログラムでそれを読み取ることもできます。例えば、車のプロジェクトに取り組んでいるとき、2つのモータの速度が一致しない場合、モータ速度の補正値を記録するキャリブレーションプログラムを書くことができます。
必要な部品
このプロジェクトでは、以下のコンポーネントが必要です。
キット全体を購入するのは確かに便利です、リンクはこちら:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
3 in 1 Starter Kit |
380+ |
以下のリンクから個別に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
- |
|
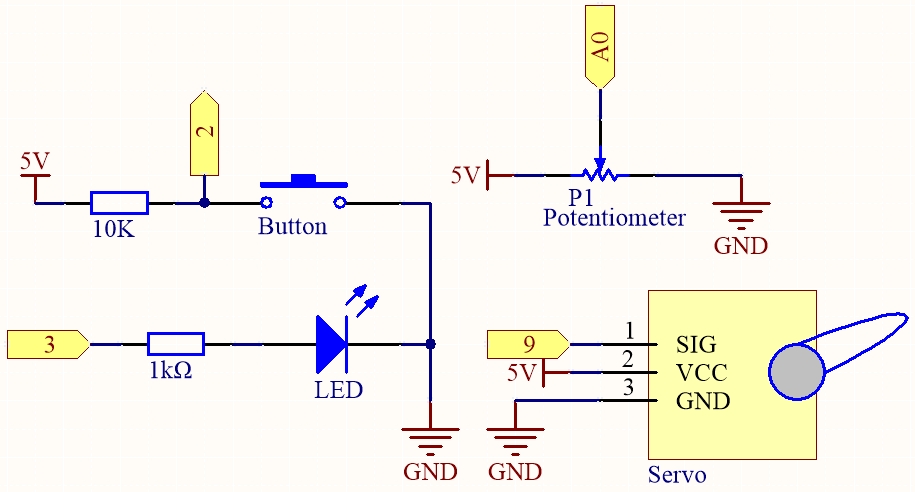
回路図
配線図

コード
注釈
3in1-kit\learning_project\5.15.eeproomのパスの下にある5.15.eeproom.inoファイルを開きます。または、このコードを Arduino IDE にコピーします。
この回路を使用するには、ボタンを押して記録を開始し、ポテンショメータを通じて所望の情報を入力します。これで、ボードはあなたのアクションを無限に繰り返します(そして、それぞれの繰り返しでLEDが点滅します)新しいアクションを記録するために再びボタンを押すまで。resolutionとrecordTimeの値を変更することで、記録される時間の長さを変更することもできます。
どのように動作するのか?
EEPROM.hライブラリをインポートし、EEPROMメモリを初期化します。... #include <EEPROM.h>//記録された値を保存するために使用 ... float resolution = 1000;//EEPROM.length() より小さくする必要があります float recordTime = 5; //遅延時間 bool recording = false; ...
/EEPROM.length() より小さくする必要がありますの点に注意してください。setup()でボードのEEPROMのメモリを印刷します。あなたのボードの場合は1024であるはずです。異なるボードを使用している場合、変数resolutionの値を変更できます。あなたのボードのEEPROMメモリを印刷します。
void setup() { ... Serial.begin(9600); //Serial.println(EEPROM.length()); }
ボードのEEPROMメモリのサイズを見つけるために、
Serial.println(EEPROM.read(i))の行のコメントを外します。これにより、シリアルモニタにEEPROMのサイズが印刷され、変数resolutionの値をそれに応じて変更できます。ボタンの押下が検出されると、録音が開始され、必要な情報がポテンショメータを介して入力されます。ボタンを再度押すまで、ボードはあなたのアクションを無限に繰り返します(そして、LEDがそれぞれの繰り返しで点滅します)。
void loop() { if (recording == true) {//record for (int i = 1; i <= resolution; i++) { digitalWrite(ledPin, HIGH); //ライトステータスLED int val = map(analogRead(A0), 0, 1023, 0, 180); EEPROM.write(i, val); //Serial.println(EEPROM.read(i)); myServo.write(val); delay(recordTime); } digitalWrite(ledPin, LOW); // ステータス LED をオフにする delay(1000);//人のために時間を与える recording = false; } else { for (int i = 1; i <= resolution; i++) {//playback if (digitalRead(buttonPin) == 0) {// 再生を停止し、新しい値を記録します recording = true; break; } int readval = EEPROM.read(i); myServo.write(readval); //Serial.println(readval); delay(recordTime); } digitalWrite(ledPin, HIGH); // 新しいリピートを表示する delay(100); digitalWrite(ledPin, LOW); } }
ボタンが押されると、変数
recordingをtrueにします。変数
recordingがtrueの場合、メモリ範囲でのアクションの録音を開始します。ポテンショメータの値を読み取り、それを0-180にマッピングしてEEPROMに保存し、サーボの回転を制御します。
録音の開始時にLEDが点灯し、終了時に消灯します。
LEDの短い点滅で記録されたアクションを繰り返します。
EEPROMライブラリについて。以下は、その機能の一部です。
write(address,value): EEPROMにバイトを書き込みます。address: 0から始まる書き込む場所(int)value: 0から255までの書き込む値(byte)EEPROMの書き込みには3.3 msかかります。EEPROMメモリの指定された寿命は100,000回の書き込み/消去サイクルなので、頻繁に書き込む際は注意が必要です。
Read(address): EEPROMからバイトを読み取ります。書き込まれていない場所の値は255です。update(address,value): EEPROMにバイトを書き込みます。書き込まれる値は、同じアドレスに既に保存されている値と異なる場合のみです。EEPROMの書き込みには3.3 msかかります。データが頻繁に変更されない場合、この関数をwrite()の代わりに使用することで、サイクルを節約できます。
EEPROM.put(address, data): EEPROMに任意のデータ型やオブジェクトを書き込みます。address: 0から始まる読み取る場所(int)。data: 読み取るデータ、プリミティブ型(例: float)やカスタム構造体が可能。この関数はEEPROM.update()を使用して書き込みを行うので、値が変わらない場合は書き込みを行いません。
EEPROM.get(address, data): EEPROMから任意のデータ型やオブジェクトを読み取ります。address: 0から始まる読み取る場所(int)。data: 読み取るデータ、プリミティブ型(例: float)やカスタム構造体が可能。