注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
5.5 内蔵ライブラリの使用¶
Arduino IDEでは、対応する .h ファイルを直接コードに追加することで、多くの組み込みライブラリを使用することができます。
このプロジェクトでは Servo ライブラリを使用してサーボを駆動し、0°から180°の間で回転させることができます。
必要な部品
このプロジェクトでは、以下の部品が必要です。
全体のキットを購入するのは確かに便利です。こちらがリンクです:
名前 |
このキットのアイテム |
リンク |
|---|---|---|
3 in 1 Starter Kit |
380+ |
以下のリンクから、個別に購入することもできます。
コンポーネントの紹介 |
購入リンク |
|---|---|
- |
|
回路図
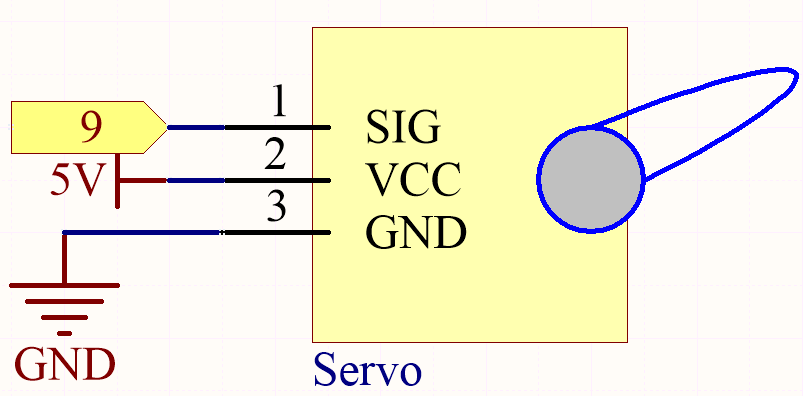
このプロジェクトでは、PWMピン9を使用してサーボを駆動し、サーボのオレンジ色のワイヤをPWMピン9に、赤色のワイヤを5Vに、茶色のワイヤをGNDに接続します。
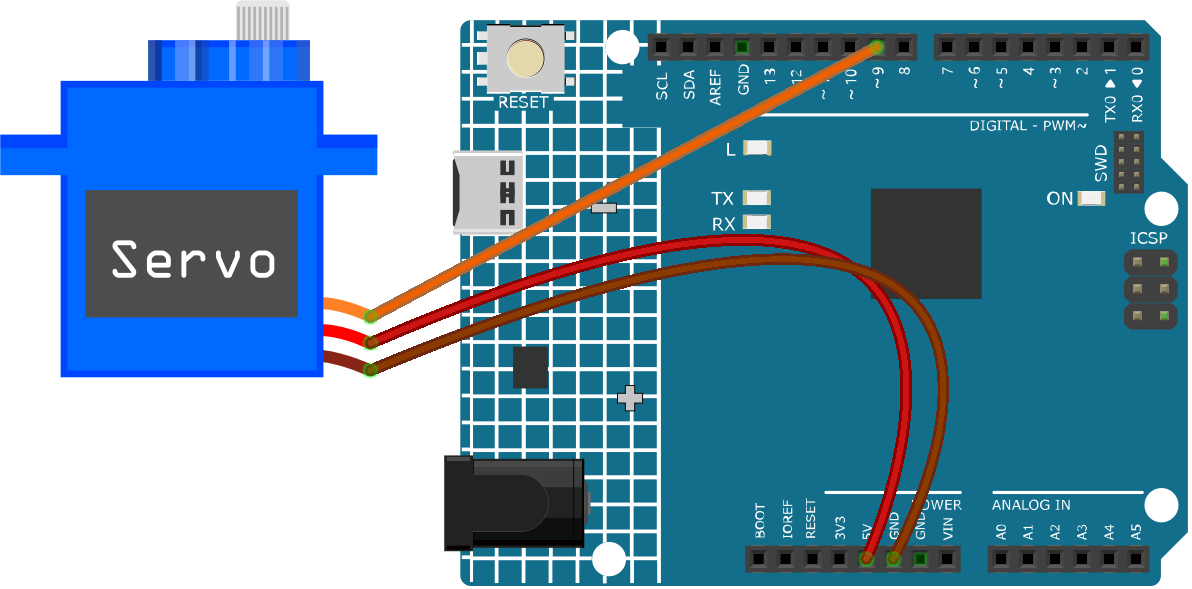
配線図
コード
注釈
3in1-kit\learning_project\5.5.use_internal_libraryのパス下の5.5.use_internal_library.inoファイルを開く。または、このコードを Arduino IDE にコピーする。
コードをR4ボードにアップロードすると、サーボアームが0°〜180°の範囲で回転するのを確認できます。
どのように動作するのか?
Servo.h ライブラリを呼び出すことで、サーボを簡単に駆動することができます。
#include <Servo.h>
ライブラリ関数:
Servo
サーボを制御するための Servo オブジェクトを作成。
uint8_t attach(int pin);
pinMode() を呼び出して、ピンをサーボドライバーに変換し、失敗した場合は0を返す。
void detach();
サーボ駆動からピンを解放。
void write(int value);
サーボの角度を度数で設定、0から180まで。
int read();
最後の write() で設定された値を返す。
bool attached();
サーボが現在アタッチされている場合は1を返す。