注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
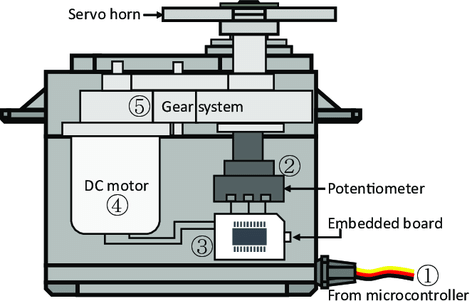
サーボ¶

サーボは一般的に、ケース、シャフト、ギアシステム、ポテンショメータ、DCモーター、および組み込みボードで構成されています。
動作原理は以下の通りです。マイクロコントローラがPWM信号をサーボに送信すると、サーボ内の組み込みボードが信号ピンを介して信号を受信し、内部のモーターを制御して回転させます。その結果、モーターはギアシステムを駆動し、減速後にシャフトを動かします。サーボのシャフトとポテンショメータは連結されています。シャフトが回転すると、ポテンショメータも駆動し、ポテンショメータから電圧信号が組み込みボードに出力されます。次に、ボードは現在の位置に基づいて回転の方向と速度を決定し、定義された正確な位置で正確に停止し、その位置を保持します。
角度は、制御ワイヤに適用されるパルスの持続時間によって決定されます。これをパルス幅変調と言います。サーボは20msごとにパルスを受け取ることを期待しています。パルスの長さによって、モーターがどれだけ回転するかが決定されます。例えば、1.5msのパルスは、モーターを90度の位置(中立位置)に回転させます。1.5ms未満のパルスがサーボに送られると、サーボはある位置に回転し、その出力シャフトを中立点から反時計回りに何度か保持します。パルスが1.5msよりも広い場合、逆の現象が発生します。サーボが有効な位置に回転する命令の最小幅と最大幅は、各サーボの関数です。一般的に、最小パルスは約0.5ms、最大パルスは2.5msの幅になります。

例
5.5 内蔵ライブラリの使用 (基本プロジェクト)
7. 数量制限ゲート (IoT プロジェクト)