注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
10. 超音波
このプロジェクトでは、超音波モジュールによって検出された距離の読み取り方法を学びます。
操作方法
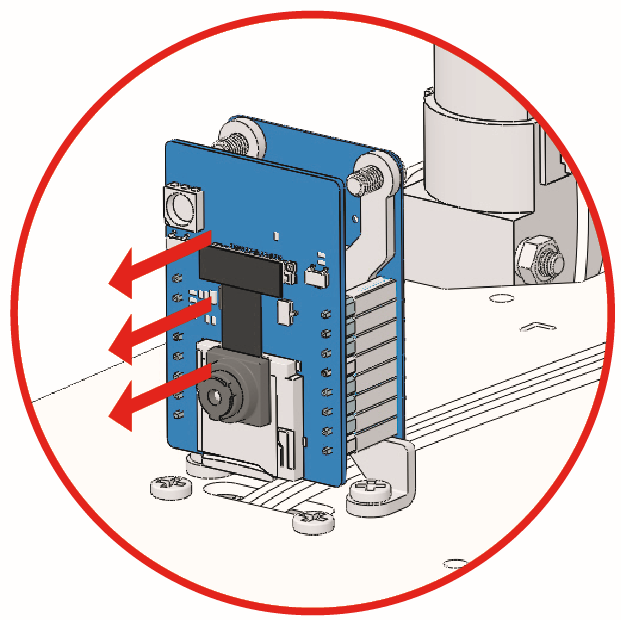
ESP32-CAMとArduinoボードは、RX(受信)およびTX(送信)のピンが共有されています。コードをアップロードする際は、まずESP32-CAMを切断して、コンフリクトや潜在的な問題を避けてください。
zeus-car-main\examples\10_ultrasonicのパスから10_ultrasonic.inoファイルを開きます。コードが正常にアップロードされたら、電源スイッチをONにしてZeus Carを起動します。
注釈
このステップでUSBを抜かないでください。コンピュータ上で超音波モジュールのデータを確認する必要があります。
シリアルモニターを開き、現在のボーレートが115200に設定されていることを確認してください。最新の印刷データを見るために オートスクロールを切り替える アイコンをクリックすることをおすすめします。
印刷されたデータは、
distance: 21.11 is_obstacle: 0のように表示されます。前方の障害物の距離が20cm以内である場合、
is_obstacle: 0はis_obstacle: 1になります。
