注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
7. コンパス
このプロジェクトでは、Zeus Carをコンパスとして使用します。 まず方向を設定し、その後車をどのように回転させても、設定した方向を向くようになります。
注釈
Zeus Carの近くに電気ワイヤが存在する場合、電磁場がqmc6310モジュールの動作に干渉して、車の進行方向が変わる可能性があります。
操作方法
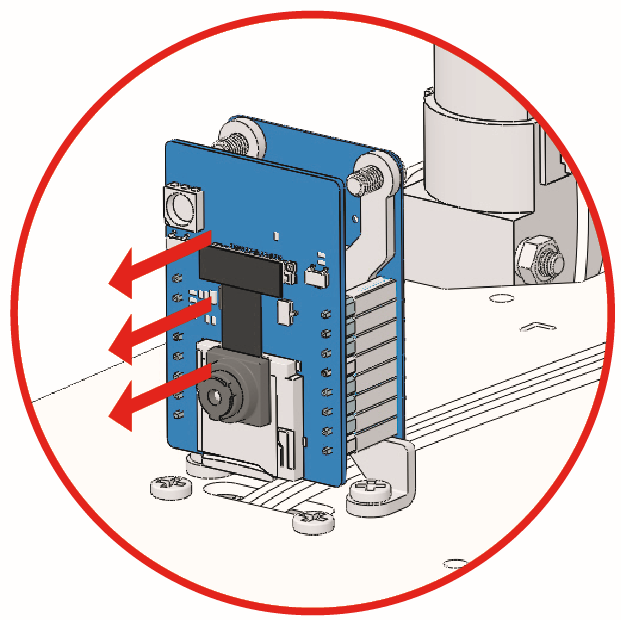
ESP32-CAMとArduinoボードは、RX(受信)およびTX(送信)のピンが共有されています。コードをアップロードする際は、まずESP32-CAMを切断して、コンフリクトや潜在的な問題を避けてください。
zeus-car-main\examples\7_compassのパスから7_compass.inoファイルを開きます。コードが正常にアップロードされたら、電源スイッチをONにしてZeus Carを起動します。
まず、qmc6310モジュールをキャリブレートしましょう。
車を地面に置く(電線が密集している場所から離れるように注意してください)。
 を押すと、車はその場で回転します。
を押すと、車はその場で回転します。その場所の磁場が完全に記録されるまで停止します。
2分以上停止しない場合は、
 を押して停止させ、別の場所で続行できます。
を押して停止させ、別の場所で続行できます。
車を向かせたい方向に向け、
 を押します。その後、車をどのように回転させても、ゆっくりと設定した方向に戻ります。
を押します。その後、車をどのように回転させても、ゆっくりと設定した方向に戻ります。地面とテーブルの磁場は異なり、再キャリブレーションが必要です。