注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
8. 移動 - フィールドセントリック制御システム
このプロジェクトは、前のプロジェクトに基づいて、Zeus Carの動きにコンパス機能を組み合わせます。 リモートコントロールでZeus Carの動きを制御している間、外部の力(例:犬に蹴られる)で逸らされた場合、自動的に元の方向に戻します。
操作方法
ESP32-CAMとArduinoボードは、RX(受信)およびTX(送信)のピンが共有されています。コードをアップロードする際は、まずESP32-CAMを切断して、コンフリクトや潜在的な問題を避けてください。
zeus-car-main\examples\8_move_field_centricのパスから8_move_field_centric.inoファイルを開きます。コードが正常にアップロードされたら、電源スイッチをONにしてZeus Carを起動します。
その後、リモートコントロールの数字1〜9を使用して、車を8つの方向に制御します。キーを押した後、Zeus Carは
 または数字キー5を押すまで移動し続けます。
または数字キー5を押すまで移動し続けます。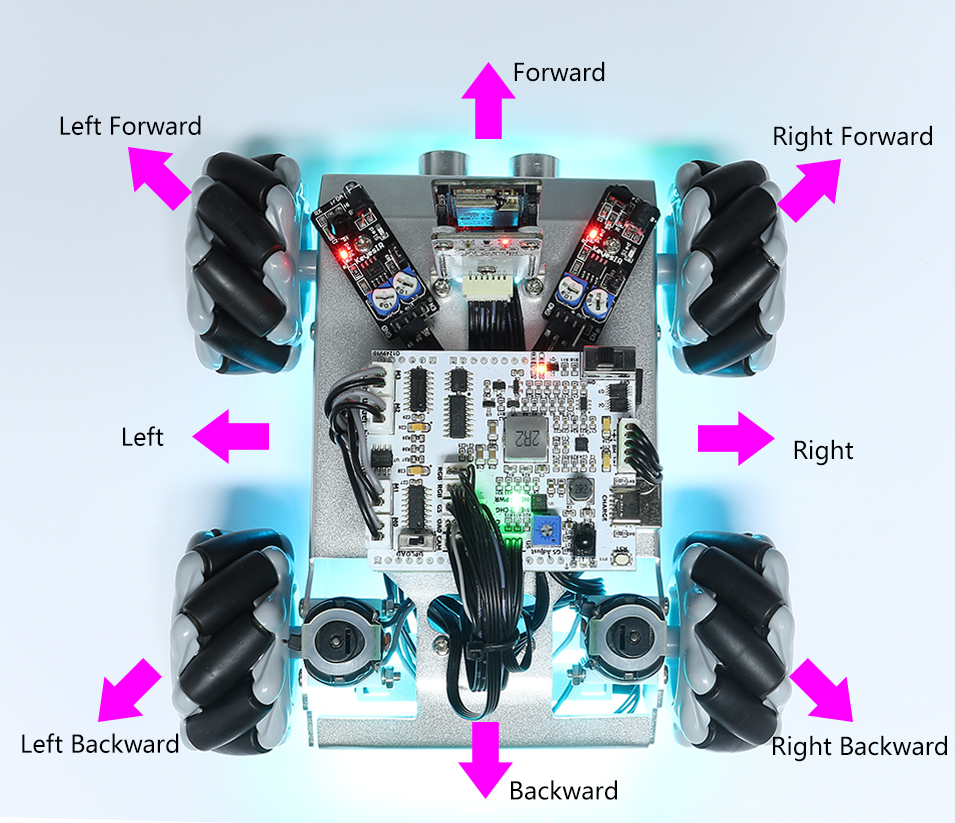
 を一度押すと、車は車体を中心に反時計回りに回転し、 または数字キー5を押すまで停止します。
を一度押すと、車は車体を中心に反時計回りに回転し、 または数字キー5を押すまで停止します。
同様に、
 を一度押すと、車は時計回りに回転し、その後 または数字キー5を押すまで停止します。
を一度押すと、車は時計回りに回転し、その後 または数字キー5を押すまで停止します。
 キーを押すと、車は左にドリフトします。
キーを押すと、車は左にドリフトします。
 キーを押すと、車は右にドリフトします。
キーを押すと、車は右にドリフトします。
注釈
Zeus Carがうまく動かない場合、コンパスが正しくキャリブレートされていない可能性があります。その場合は
 を押してキャリブレートしてください。
を押してキャリブレートしてください。車を地面からテーブルに持ち上げると、磁場が変わるため、再キャリブレーションが必要です。