注釈
こんにちは!SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Communityへようこそ!Raspberry Pi、Arduino、ESP32について、他の愛好者と一緒にさらに深く学んでいきましょう。
参加する理由
専門家のサポート: 購入後の問題や技術的な課題を、コミュニティやチームのサポートを受けて解決できます。
学びと共有: ヒントやチュートリアルを交換し、スキルを向上させましょう。
特別プレビュー: 新製品の発表や先行公開をいち早く手に入れることができます。
特別割引: 新しい製品に対する限定割引を楽しめます。
フェスティブプロモーションとプレゼント: プレゼントや祝祭プロモーションに参加できます。
👉 私たちと一緒に探求し、創造する準備はできましたか?[ここ]をクリックして、今すぐ参加しましょう!
EzBlockのクイックガイド
注釈
Raspberry Pi 5をご使用の場合、グラフィカルプログラミングソフトウェアEzBlockはサポートされていません。
サーボの角度範囲は-90~90度ですが、工場出荷時に設定された角度はランダムで、0°や45°の可能性があります。この角度で直接組み立てを行うと、ロボットがコードを実行した際に動作が乱れるか、最悪の場合はサーボがロックされて焼損する原因となります。
そのため、すべてのサーボ角度を0°に設定してから取り付ける必要があります。これにより、サーボの角度は中央に位置し、どの方向に回転させても問題ありません。
まず、Install EzBlock OS (EzBlockの公式チュートリアル)をMicro SDカードにインストールし、インストールが完了したら、それをRaspberry Piに挿入します。
注釈
インストールが完了したら、このページに戻ってください。
サーボが適切に0°に設定されていることを確認するため、サーボアームをサーボシャフトに挿入し、ロッカーアームを異なる角度に優しく回転させます。このサーボアームは、サーボが回転していることを明確に確認するためのものです。

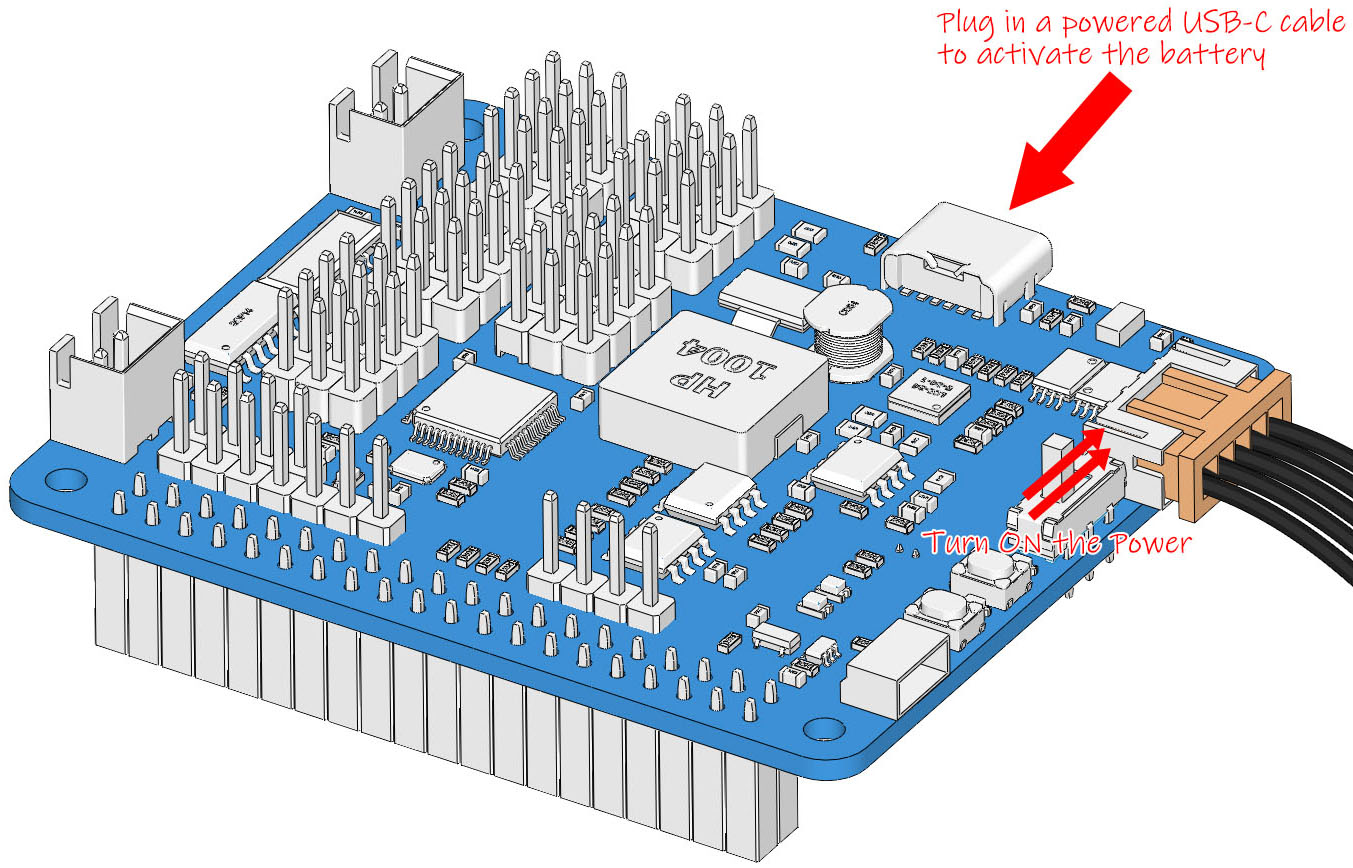
組立図に従い、バッテリーケーブルを挿入し、電源スイッチをONにします。次に、電源が供給されるようにUSB-Cケーブルを差し込んでバッテリーを起動します。1〜2分待つと、Raspberry Piの起動が成功したことを知らせる音が鳴ります。
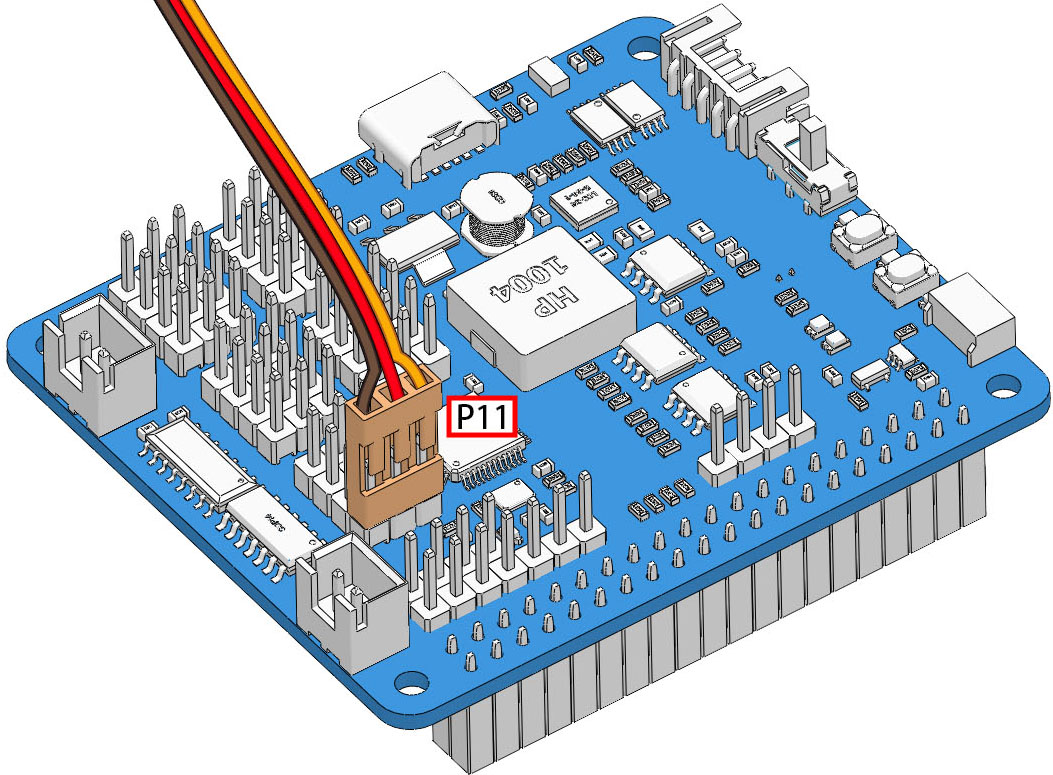
次に、サーボケーブルをP11ポートに挿入します。
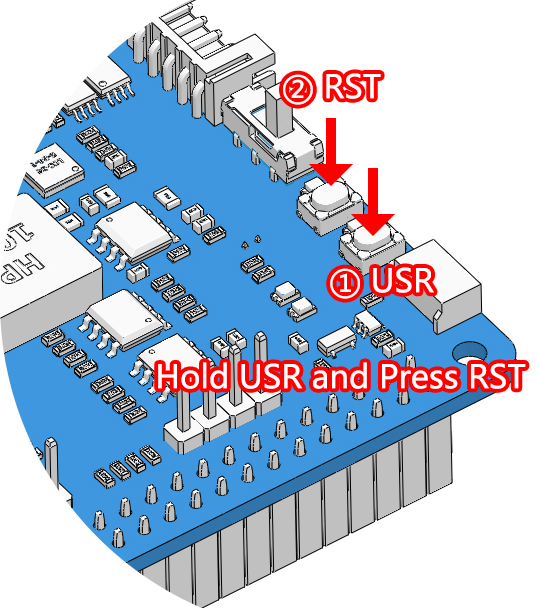
USR ボタンを押し続け、次に RST ボタンを押して、システム内でサーボゼロ設定スクリプトを実行します。サーボアームが回転して位置に到達すると(これは0°の位置であり、ランダムな場所であり、垂直または平行ではない場合があります)、プログラムが実行されたことを示します。
注釈
この手順は一度だけ実行すれば十分です。その後、他のサーボケーブルを挿入すれば、自動的にゼロ設定が行われます。
これでサーボアームを取り外しますが、サーボケーブルが接続されていることを確認し、電源を切らないでください。その後、紙の組み立て指示に従って作業を続けます。
注釈
サーボスクリューでサーボを固定する前に、サーボケーブルを抜かないでください。固定後にケーブルを抜くことができます。
電源が入っている状態でサーボを回転させないでください。損傷を防ぐためです。サーボシャフトが誤った角度で挿入されている場合は、サーボを抜き、再度挿入してください。
各サーボを組み立てる前に、サーボケーブルをP11に挿入し、電源を入れて角度を0°に設定する必要があります。
EzBlockアプリで後でプログラムをダウンロードすると、このゼロ設定機能は無効になります。