注釈
こんにちは、FacebookのSunFounder Raspberry Pi & Arduino & ESP32愛好者コミュニティへようこそ! Raspberry Pi、Arduino、ESP32について、他の愛好者と一緒に深く学びましょう。
なぜ参加するべきか?
専門家によるサポート:購入後の問題や技術的な課題を、コミュニティやチームの支援を通じて解決できます。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換できます。
限定プレビュー:新製品の発表やプレビューをいち早く見ることができます。
特別割引:最新製品に対する専用割引を享受できます。
季節のプロモーションとプレゼント企画:プレゼント企画やホリデープロモーションに参加できます。
👉 一緒に探求し、創造を楽しみたいですか? [ここ] をクリックして、今すぐ参加しましょう!
FAQ
Q1: Ezblock OSをインストールした後、サーボが0°に戻らないのはなぜですか?
サーボのケーブルが正しく接続されているか、Robot HATの電源が入っているかを確認してください。
リセットボタンを押してください。
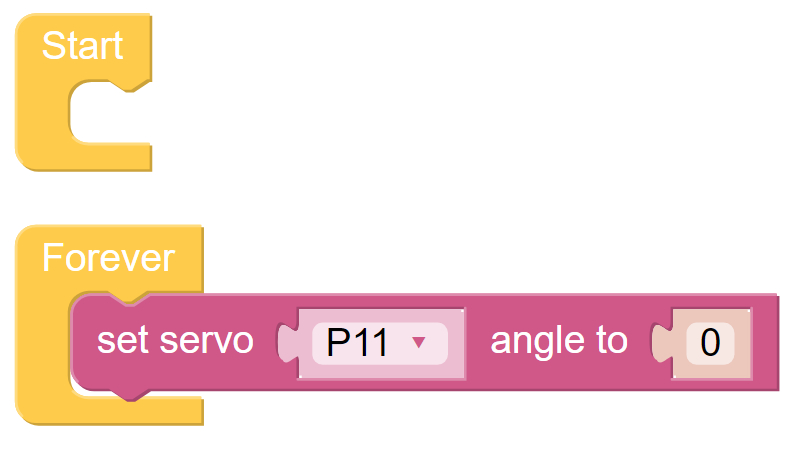
すでにEzblock Studioでプログラムを実行している場合、P11用のカスタムプログラムは利用できません。以下の画像を参考にして、Ezblock Studioでサーボ角度を0に設定するプログラムを手動で作成してください。
Q2: VNCを使用していると、「デスクトップを表示できません」と表示されるのはなぜですか?
ターミナルで sudo raspi-config を入力し、解像度を変更してください。
Q3: サーボが時々理由もなく中央位置に戻るのはなぜですか?
サーボが構造物や他の物体にブロックされ、意図した位置に到達できない場合、サーボは過電流による故障を防ぐため、電源オフ保護モードに入ります。
一定時間電源が切れた後、PWM信号がサーボに送信されない場合、サーボは自動的に元の位置に戻ります。
Q4: Robot HATの詳細なチュートリアルについては?
Robot HATの詳細なチュートリアルは、こちらで確認できます。ハードウェアやAPIに関する情報も含まれています。
Q5: バッテリーチャージャーについて
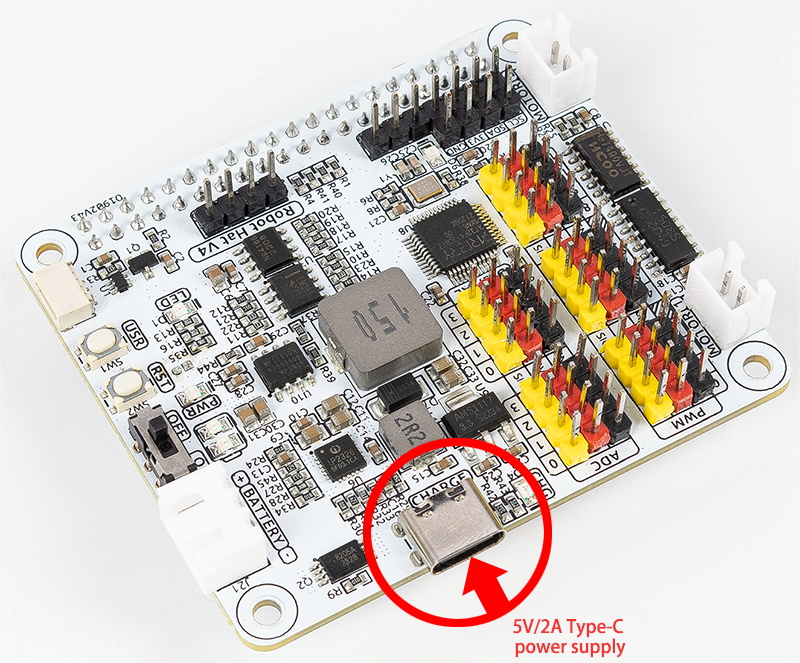
バッテリーを充電するには、5V/2AのType-C電源をRobot Hatの電源ポートに接続するだけで構いません。充電中にRobot Hatの電源スイッチをオンにする必要はありません。 充電中でもデバイスを使用することができます。
充電中は、充電チップが入力電力をブーストしてバッテリーを充電すると同時に、外部用のDC-DCコンバータに電力を供給します。充電出力はおおよそ10Wです。 外部の消費電力が長時間にわたって高い状態が続く場合、バッテリーが電力供給を補助することがあります。これは、スマートフォンを充電しながら使用する場合と似ています。ただし、同時に充電と使用を行う際には、バッテリー容量が完全に消耗しないよう注意してください。
Q6: PiCamera のインストールについて
お使いの Raspberry Pi のモデル(Raspberry Pi 5/4/Zero 2 W モデル)に応じて PiCamera をインストールしてください。