注釈
こんにちは、FacebookのSunFounder Raspberry Pi & Arduino & ESP32愛好者コミュニティへようこそ!Raspberry Pi、Arduino、ESP32について、他の愛好者と一緒にさらに深く学んでいきましょう。
なぜ参加するべきか?
専門家によるサポート:購入後の問題や技術的な課題を、コミュニティやチームの支援を通じて解決できます。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換できます。
限定プレビュー:新製品の発表やプレビューをいち早く見ることができます。
特別割引:最新製品に対する専用割引を享受できます。
季節のプロモーションとプレゼント企画:プレゼント企画やホリデープロモーションに参加できます。
👉 一緒に探求し、創造を楽しみたいですか? [ここ] をクリックして、今すぐ参加しましょう!
PiCrawlerのキャリブレーション
PiCrawlerを接続した後、キャリブレーションの手順が必要です。これは、組み立て時に発生する可能性のあるズレや、サーボモーター自体の限界により、サーボの角度がわずかに傾いてしまうためです。この手順でキャリブレーションを行うことで、正しい位置に調整できます。
しかし、組み立てが完璧でキャリブレーションが不要だと思う場合は、この手順をスキップすることも可能です。
注釈
使用中にロボットのキャリブレーションを再調整したい場合は、以下の手順に従ってください。
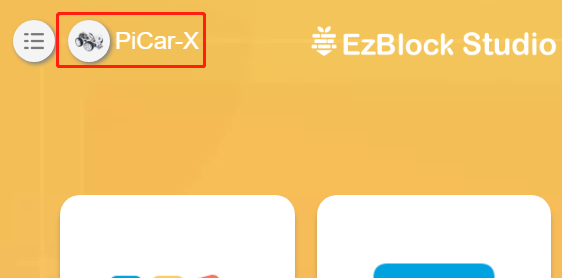
左上隅にある接続アイコンをクリックして、製品詳細ページを開きます。
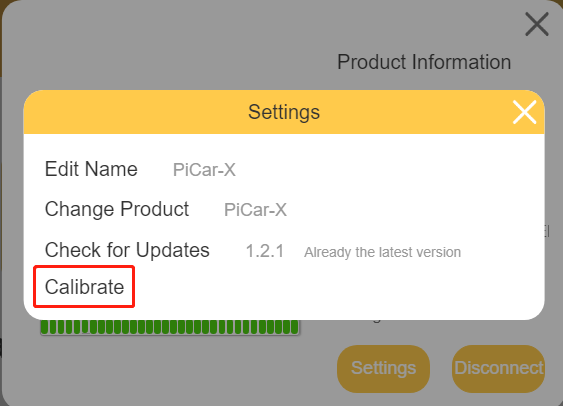
設定 ボタンをクリックします。

このページでは、製品名や製品タイプの変更、アプリのバージョン確認、またはロボットのキャリブレーションができます。 キャリブレーション をクリックすると、キャリブレーションページに進むことができます。
キャリブレーションの手順は次の通りです:
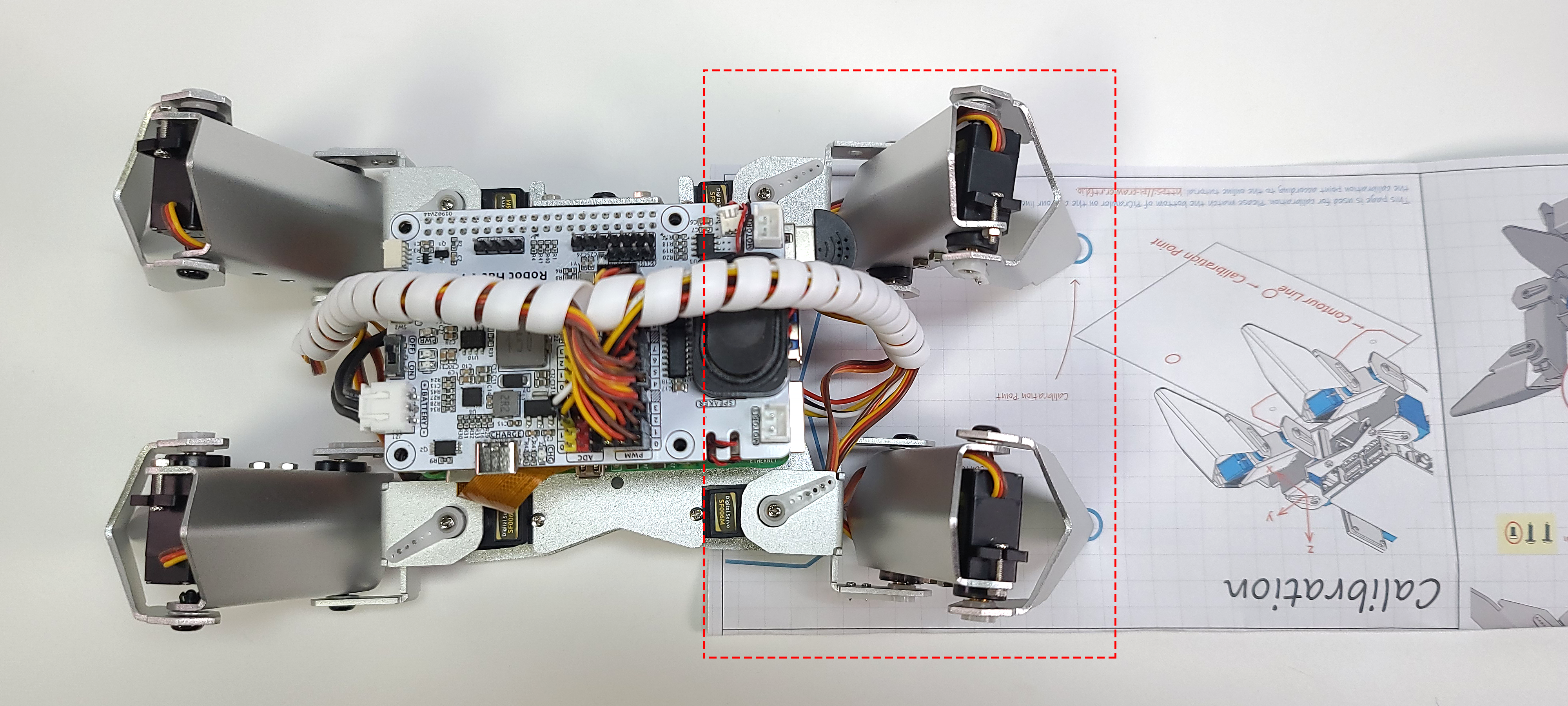
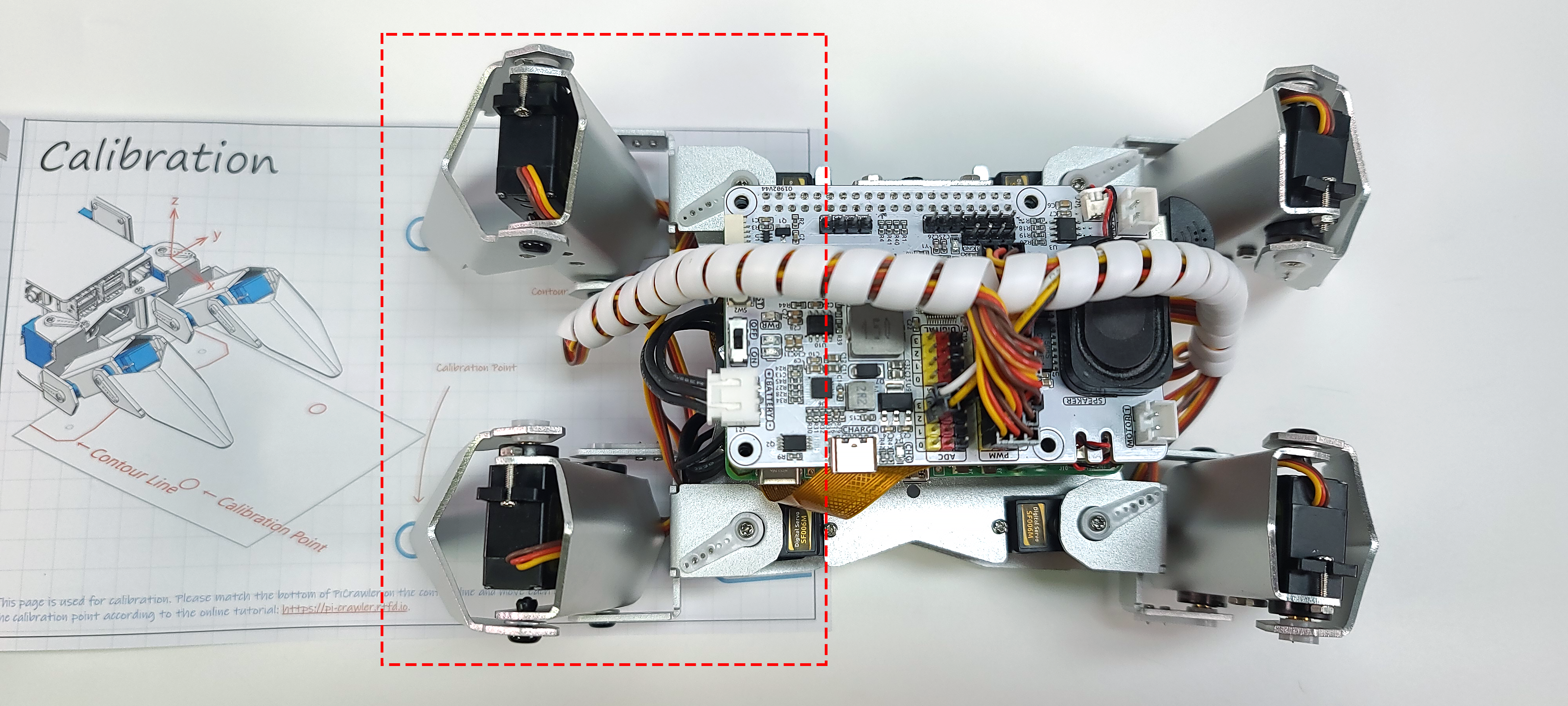
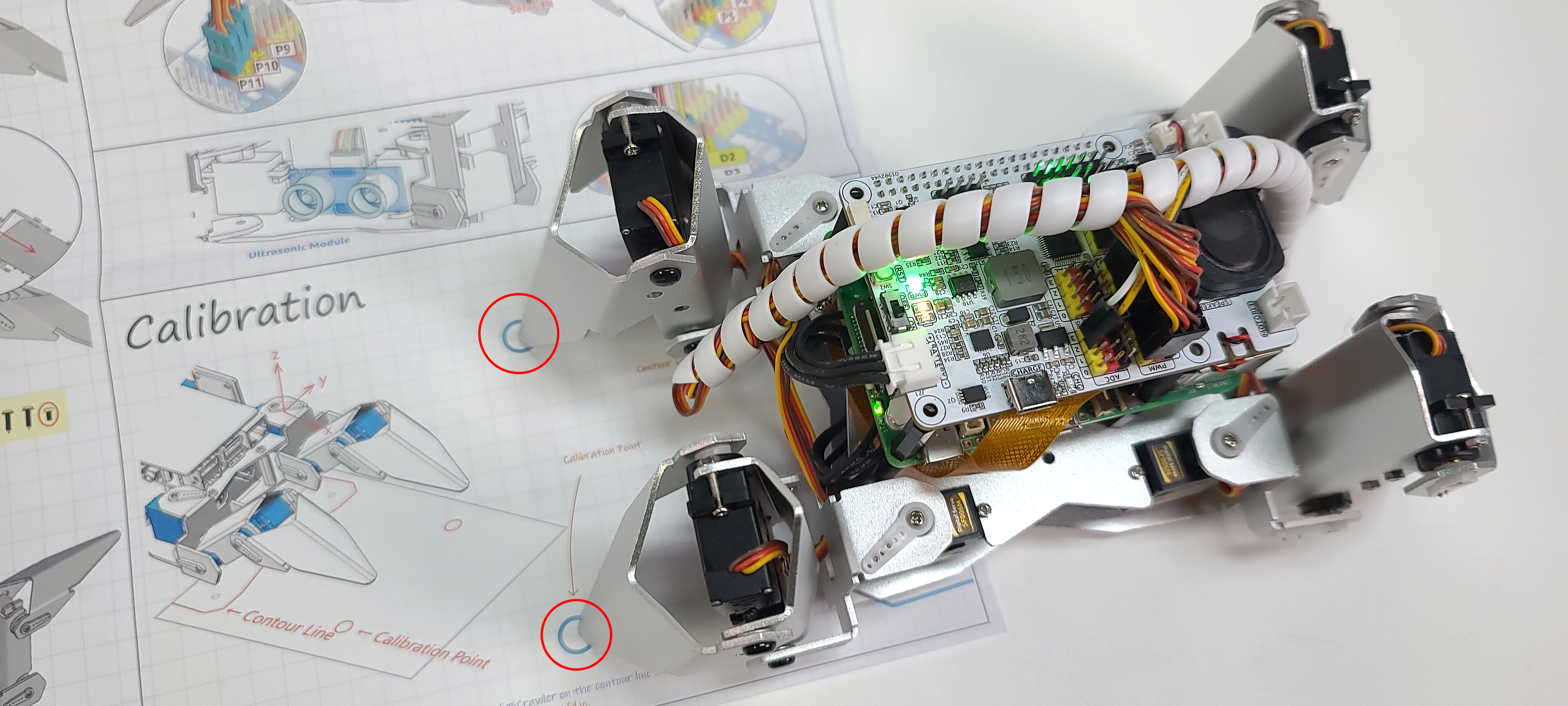
組み立て用のリーフレットを取り出し、最後のページを開いてテーブルに平らに置きます。その後、PiCrawlerを以下のように配置し、底面をキャリブレーションチャートのアウトラインに合わせます。
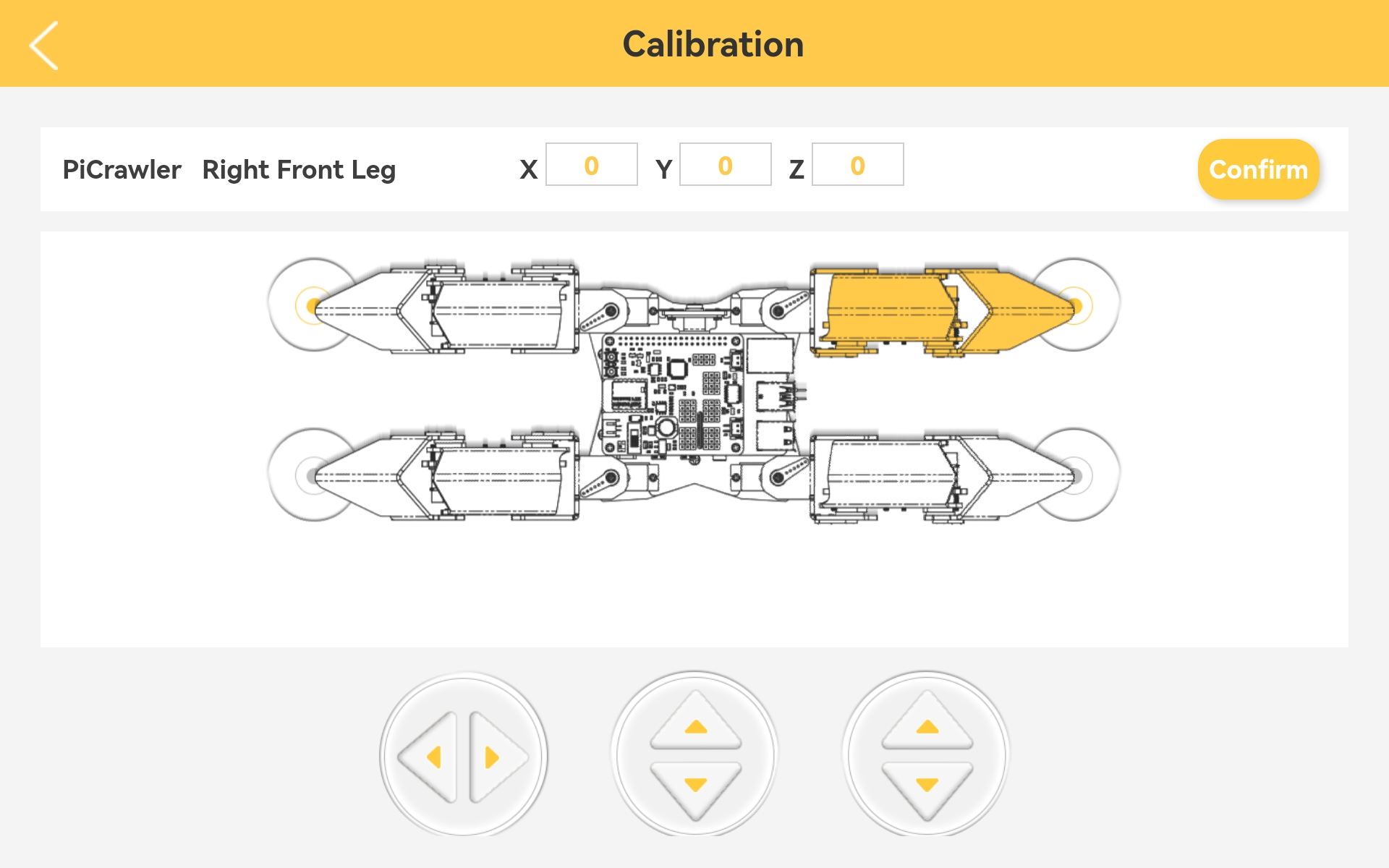
EzBlock Studioに戻り、左側の1本の足を選択し、X、Y、Zの3つのボタンをクリックして、足の先端がキャリブレーションポイントにゆっくり合わせるように調整します。
キャリブレーションボタンは微調整用で、これらのボタンを何度か押すとピンの位置が変わるのが見えます。
Z軸の上ボタンを先に押して足を持ち上げ、次にX軸とY軸を調整することをお勧めします。
左側の足を同様にキャリブレーションします。
左の2本の足をキャリブレーションした後、キャリブレーション用紙を右に移動し、同じ手順で右の2本の足をキャリブレーションします。