注釈
こんにちは、FacebookのSunFounder Raspberry Pi & Arduino & ESP32愛好者コミュニティへようこそ!Raspberry Pi、Arduino、ESP32について、他の愛好者と一緒にさらに深く学んでいきましょう。
なぜ参加するべきか?
専門家によるサポート:購入後の問題や技術的な課題を、コミュニティやチームの支援を通じて解決できます。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換できます。
限定プレビュー:新製品の発表やプレビューをいち早く見ることができます。
特別割引:最新製品に対する専用割引を享受できます。
季節のプロモーションとプレゼント企画:プレゼント企画やホリデープロモーションに参加できます。
👉 一緒に探求し、創造を楽しみたいですか? [ここ] をクリックして、今すぐ参加しましょう!
ツイスト
これまでにPiCrawlerが特定のポーズを取る方法を学びましたが、次のステップはこれらのポーズを組み合わせて連続的な動作を作成することです。
ここでは、PiCrawlerの4つの足がペアで上下に動き、音楽に合わせてジャンプします。
プログラム
注釈
以下の画像を参考にしてプログラムを作成できます。詳細なチュートリアルについては、How to Create a New Project? をご参照ください。
または、EzBlock Studioの Examples ページで同名のコードを見つけ、 実行 または 編集 をクリックして直接操作することもできます。
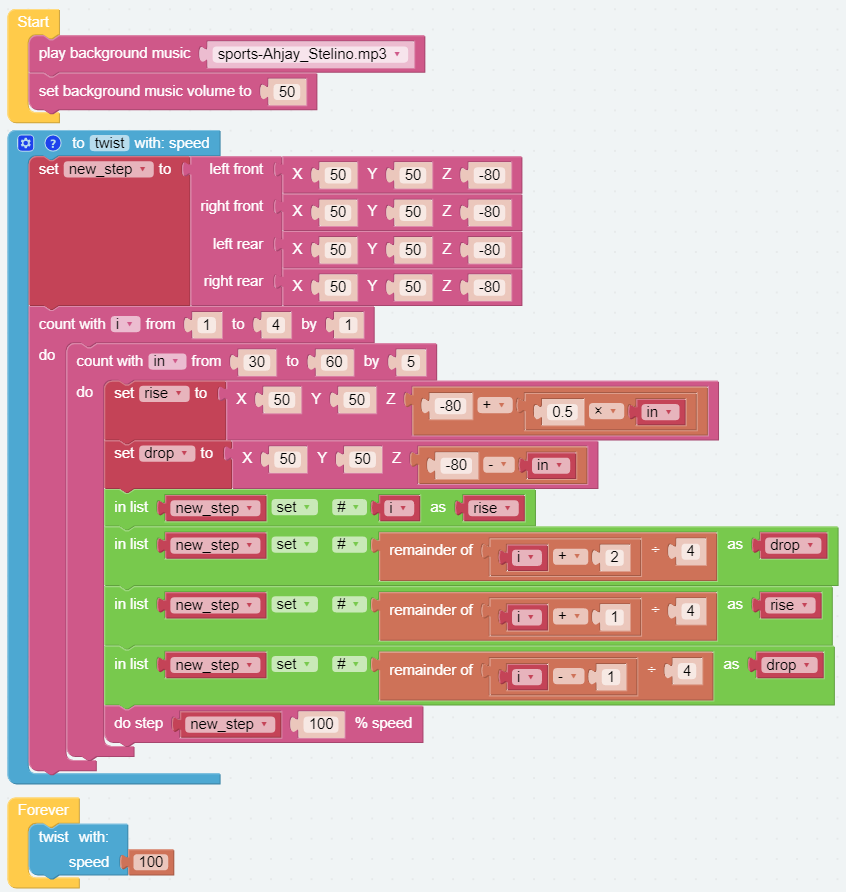
動作の仕組み
このプログラムでは、2層のforループを使用して new_step 配列が連続的かつ規則的に変化するようにし、その一方で do step がポーズを実行して連続した動作を形成します。
各ポーズに対応する座標値の配列は、姿勢の調整 から直感的に取得できます。
注意すべき点は、この座標行列ブロックです:
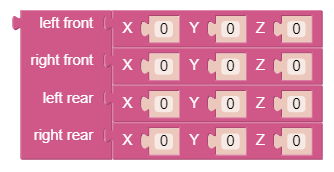
本質的には二次元配列であり、 List カテゴリー内のブロックを使って処理できます。その構造は [[右前],[左前],[左後],[右後]] です。
つまり、この例では、 new_step#1 は右前に対応し、 new_step#2 は左前、 new_step#3 は左後、 new_step#4 は右後に対応しています。