注釈
こんにちは、FacebookのSunFounder Raspberry Pi & Arduino & ESP32愛好者コミュニティへようこそ!Raspberry Pi、Arduino、ESP32について、他の愛好者と一緒にさらに深く学んでいきましょう。
なぜ参加するべきか?
専門家によるサポート:購入後の問題や技術的な課題を、コミュニティやチームの支援を通じて解決できます。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換できます。
限定プレビュー:新製品の発表やプレビューをいち早く見ることができます。
特別割引:最新製品に対する専用割引を享受できます。
季節のプロモーションとプレゼント企画:プレゼント企画やホリデープロモーションに参加できます。
👉 一緒に探求し、創造を楽しみたいですか? [ここ] をクリックして、今すぐ参加しましょう!
障害物回避
このプロジェクトでは、PiCrawlerが超音波モジュールを使用して前方の障害物を検出します。 PiCrawlerが障害物を検出すると、信号を送信し、別の方向に進むための道を探します。
プログラム
注釈
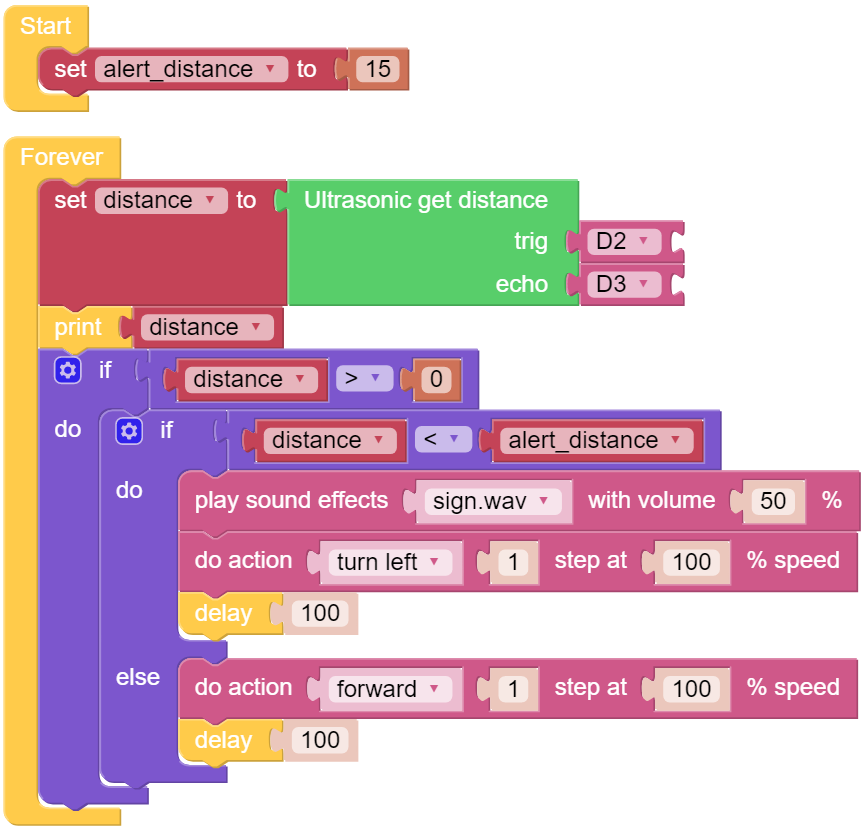
以下の画像に従ってプログラムを書くことができます。詳細なチュートリアルについては、How to Create a New Project? をご参照ください。
あるいは、EzBlock Studioの Examples ページで同名のコードを見つけて、 実行 または 編集 を直接クリックすることができます。
仕組みは?
距離検出を実現するために、 Module カテゴリに次のブロックを使用します:
注意すべき点は、ブロックの2つのピンが実際の配線に対応していることです。つまり、trigはD2、echoはD3です。
以下はメインプログラムの概要です。
超音波モジュールで検出された
distanceを読み取り、0未満の値をフィルタリングします(超音波モジュールが障害物から遠すぎるか、データを正しく読み取れない場合、distance<0が表示されます)。distanceがalert_distance(以前設定したしきい値、10)未満の場合、効果音sign.wavを再生します。PiCrawlerは左に回転します。distanceがalert_distanceより大きい場合、PiCrawlerは前進します。