注釈
こんにちは、FacebookのSunFounder Raspberry Pi & Arduino & ESP32愛好者コミュニティへようこそ!Raspberry Pi、Arduino、ESP32について、他の愛好者と共にさらに深く学んでいきましょう。
なぜ参加するべきか?
専門家によるサポート:購入後の問題や技術的な課題を、コミュニティやチームの支援を通じて解決できます。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換できます。
限定プレビュー:新製品の発表やプレビューをいち早く見ることができます。
特別割引:最新製品に対する専用割引を享受できます。
季節のプロモーションとプレゼント企画:プレゼント企画やホリデープロモーションに参加できます。
👉 一緒に探求し、創造を楽しみたいですか? [ここ] をクリックして、今すぐ参加しましょう!
新しいステップを記録
このプロジェクトでは、リモート機能を使ってPiCrawlerを操作し、いくつかのポーズを順番に取らせ、それらのポーズを記録します。後で再生することができます。
プログラム
注釈
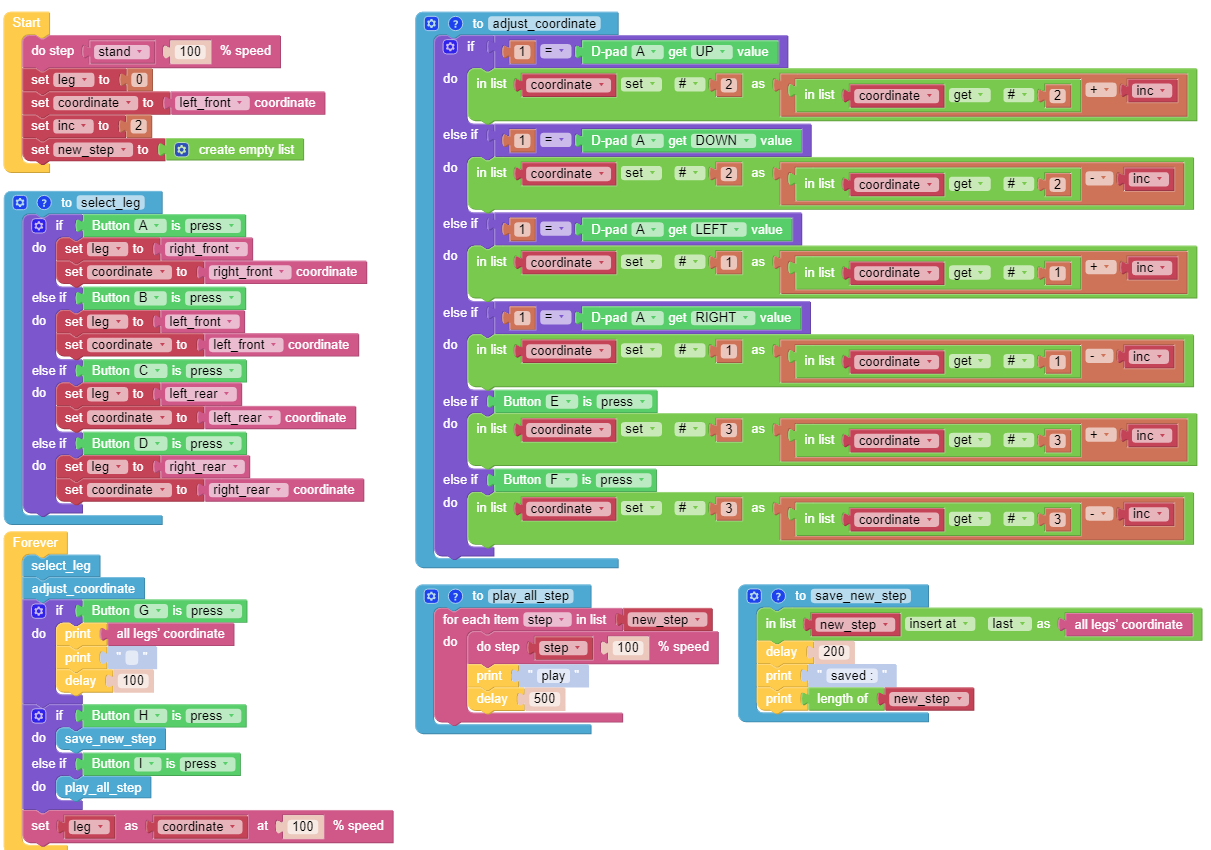
以下の画像を参考にしてプログラムを書くことができます。詳細なチュートリアルについては、How to Create a New Project? をご参照ください。
または、EzBlock Studioの Examples ページで同名のコードを見つけ、 実行 または 編集 をクリックすることができます。
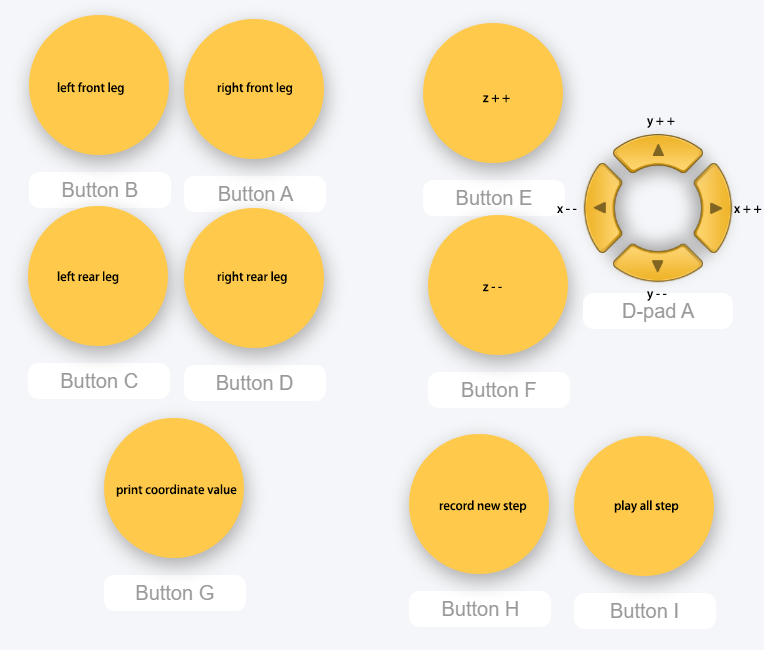
リモートコントロールインターフェースに切り替えると、次のウィジェットが表示されます。
動作の仕組み
このプロジェクトは、姿勢の調整 から派生したもので、記録および再生機能が追加されています。
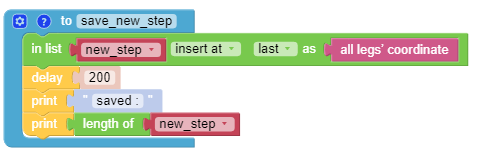
記録機能は次のコードによって実装されています。
再生機能は次のコードによって実装されています。
