注釈
こんにちは、FacebookのSunFounder Raspberry Pi & Arduino & ESP32愛好者コミュニティへようこそ!Raspberry Pi、Arduino、ESP32について、他の愛好者と共にさらに深く学んでいきましょう。
なぜ参加するべきか?
専門家によるサポート:購入後の問題や技術的な課題を、コミュニティやチームの支援を通じて解決できます。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換できます。
限定プレビュー:新製品の発表やプレビューをいち早く見ることができます。
特別割引:最新製品に対する専用割引を享受できます。
季節のプロモーションとプレゼント企画:プレゼント企画やホリデープロモーションに参加できます。
👉 一緒に探求し、創造を楽しみたいですか? [ここ] をクリックして、今すぐ参加しましょう!
ポーズ
PiCrawlerは座標配列を使って特定のポーズを取ることができます。ここでは、右後ろ足を上げたポーズを取らせています。
プログラム
注釈
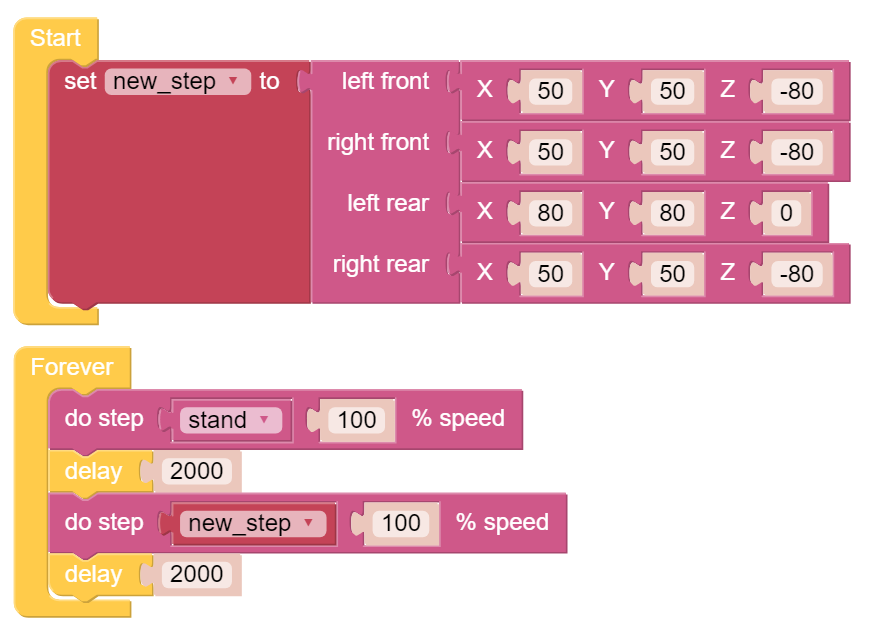
以下の画像を参考にしてプログラムを書くことができます。詳細なチュートリアルについては、How to Create a New Project? をご参照ください。
または、EzBlock Studioの Examples ページで同名のコードを見つけ、 実行 または 編集 をクリックすることができます。
仕組みは?
このコードで注目すべきは、この do step です。
それには2つの使い方があります:
直接 stand (立つ)や sit (座る)を使うことができます。
また、4つの座標値の配列を書いて指定することもできます。
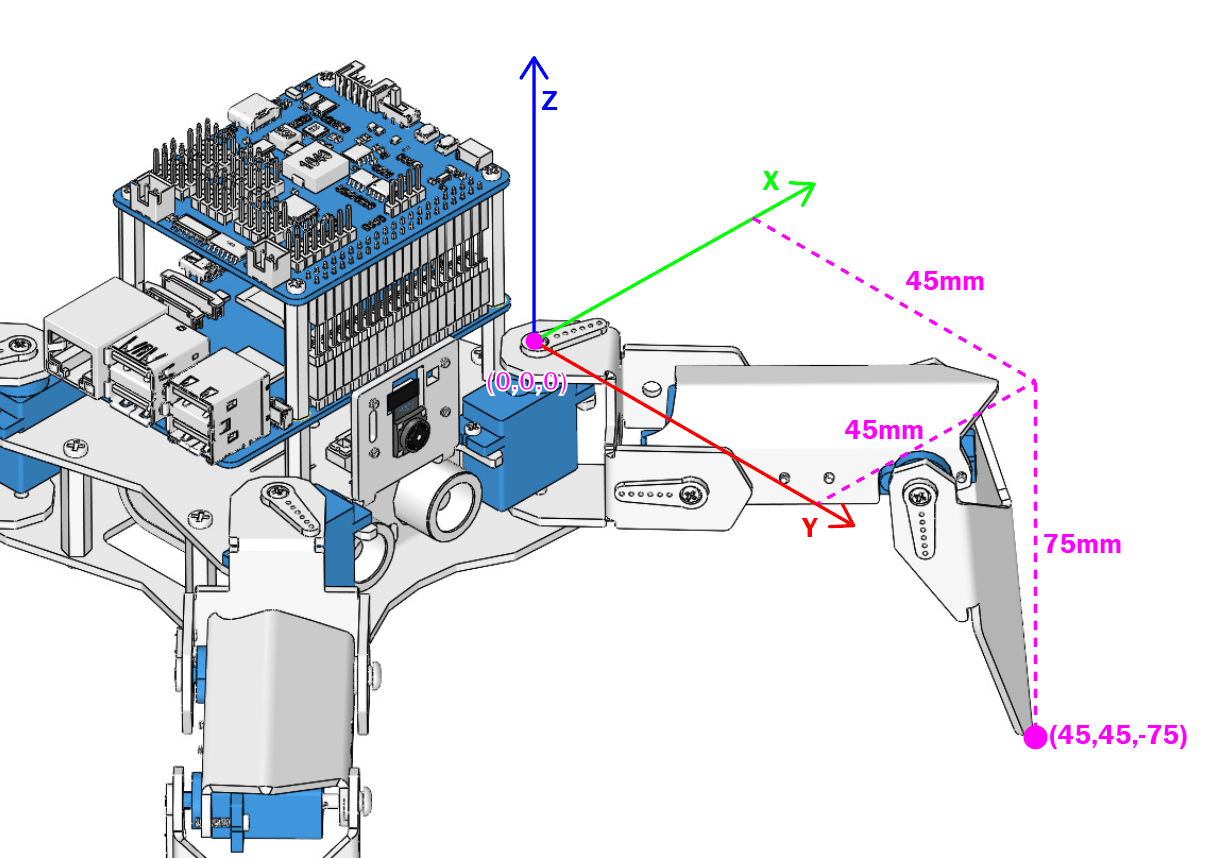
各足には独立した座標系があります。以下のようになります:
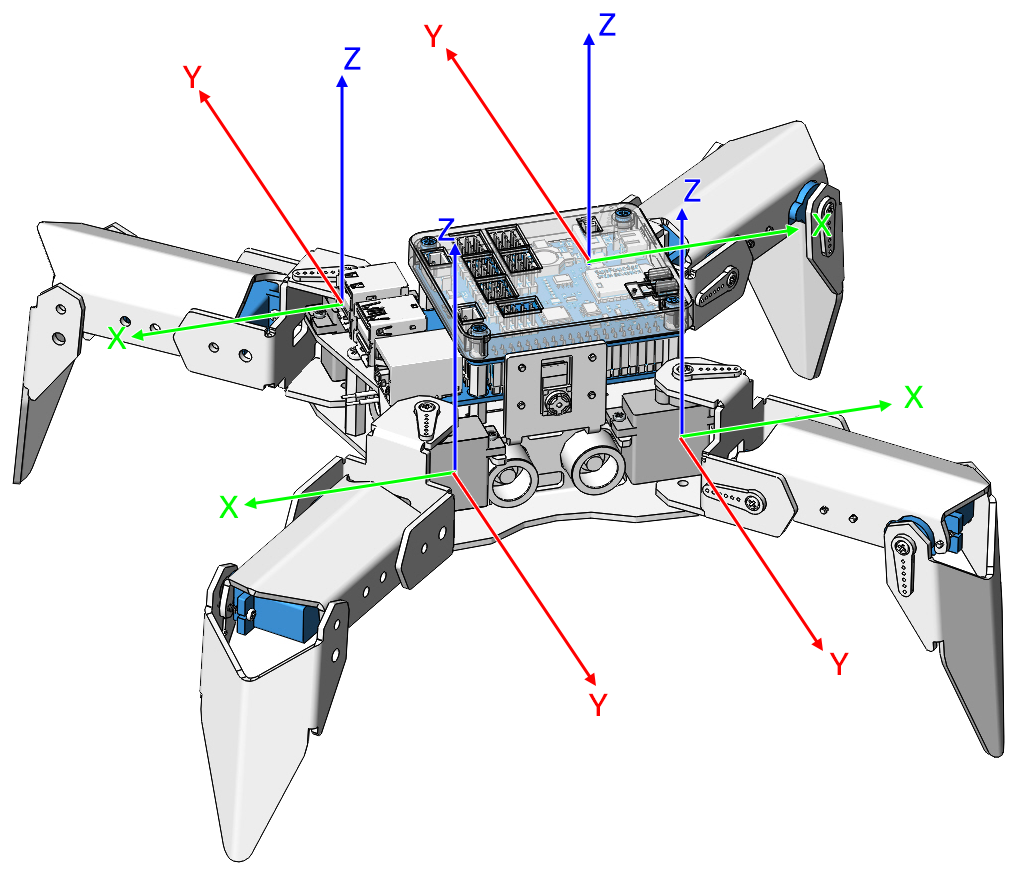
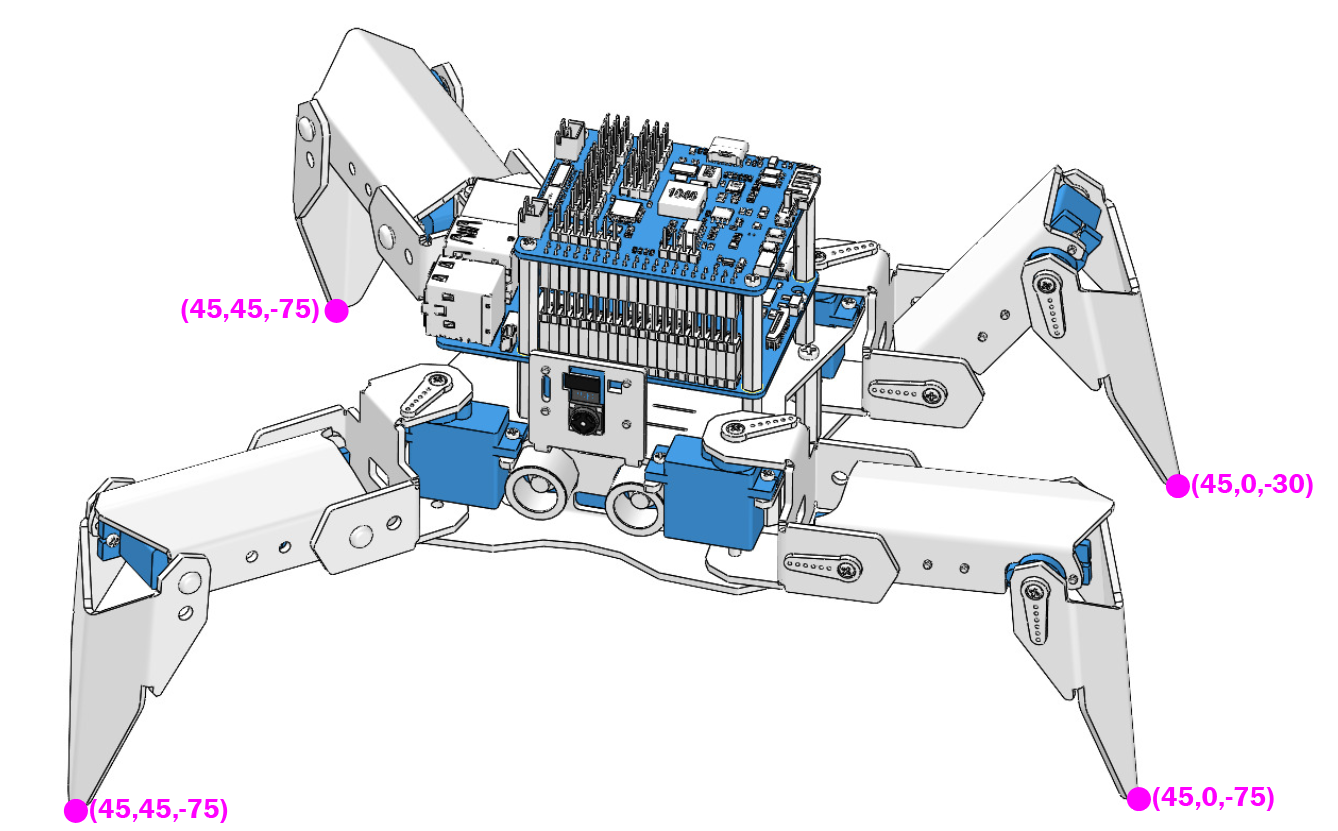
各つま先の座標を個別に測定する必要があります。以下のように示されます: