注釈
こんにちは、FacebookのSunFounder Raspberry Pi & Arduino & ESP32愛好者コミュニティへようこそ!Raspberry Pi、Arduino、ESP32について、他の愛好者と共にさらに深く学んでいきましょう。
なぜ参加するべきか?
専門家によるサポート:購入後の問題や技術的な課題を、コミュニティやチームの支援を通じて解決できます。
学びと共有:スキルを向上させるためのヒントやチュートリアルを交換できます。
限定プレビュー:新製品の発表やプレビューをいち早く見ることができます。
特別割引:最新製品に対する専用割引を享受できます。
季節のプロモーションとプレゼント企画:プレゼント企画やホリデープロモーションに参加できます。
👉 一緒に探求し、創造を楽しみたいですか? [ここ] をクリックして、今すぐ参加しましょう!
移動
これはPiCrawlerの最初のプロジェクトです。最も基本的な機能である「移動」を実行します。
プログラム
注釈
以下の画像を参考にしてプログラムを書くことができます。詳細なチュートリアルについては、How to Create a New Project? をご参照ください。
または、EzBlock Studioの Examples ページで同名のコードを見つけ、 実行 または 編集 をクリックすることができます。

画面右下の「アップロード & 実行」ボタンをクリックすると、PiCrawlerは「前進」と「後退」の動作を順番に実行します。
動作の仕組み
まず、Ezblockのプログラムフレームワークを理解する必要があります。以下のようになります。
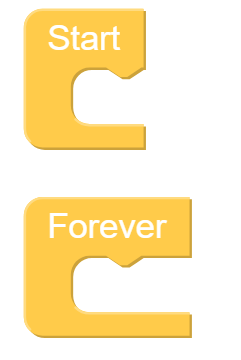
すべてのEzblockプロジェクトには、この2つのブロックが含まれています。 Start ブロックはプログラムの最初に実行され、一度だけ実行されます。主に変数の設定に使用されます。 Forever ブロックは Start の後に実行され、繰り返し実行されます。主にメイン機能を実装するために使用されます。 これらの2つのブロックを削除した場合、左側の Basic カテゴリーから再度ドラッグして追加できます。
次に、以下のブロックを理解する必要があります。

do action ブロックは、PiCrawlerに基本的な動作を実行させることができます。最初のグルーブでオプションを変更できます。例えば、「左に曲がる」や「後ろに進む」などです。 2番目のグルーブでは、動作の実行回数を設定できます。ここには、0より大きい整数のみを入力できます。 3番目のグルーブでは、動作の速度を設定できます。0から100の範囲の整数のみを入力できます。

do step**は、 **do action に似ていますが、動作ではなく静的な姿勢を設定するものです。例えば「立つ」や「座る」などです。
これらの2つのブロックは、左側の PiCrawler カテゴリーからドラッグして使用できます。