Nota
Ciao, benvenuto nella Community di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci il mondo di Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirti a noi?
Supporto Esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato a nuovi annunci di prodotti e anteprime.
Sconti Speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a promozioni e concorsi durante le festività.
👉 Pronto a esplorare e creare con noi? Clicca [qui] e unisciti oggi stesso!
Postura
PiCrawler può assumere una postura specifica scrivendo un array di coordinate. Qui assume una postura con il piede posteriore destro sollevato.
Esegui il Codice
cd ~/picrawler/examples
sudo python3 do_step.py
Dopo aver eseguito il programma, il robot si alza lentamente per raggiungere una postura stabile.
Una volta in piedi, il robot esegue ripetutamente due azioni in un ciclo. Prima entra in una postura di passo in piedi e mantiene la posizione per alcuni secondi, quindi passa a un passo personalizzato in cui le gambe si muovono verso coordinate diverse. Questo crea un movimento ripetuto di cambiamento della postura.
Il robot continua ad alternare queste due pose finché il programma non viene interrotto. Se si preme Ctrl+C, il programma termina in modo sicuro e il robot torna alla posizione seduta.
Codice
#!/usr/bin/env python3
from picrawler import Picrawler
from time import sleep
# Create Picrawler instance
crawler = Picrawler()
# Leg order:
# [right front], [left front], [left rear], [right rear]
new_step = [[45, 45, -75], [45, 0, -75], [45, 0, -30], [45, 45, -75]]
# Get the default stand step from the move list
stand_step = crawler.move_list['stand'][0]
def main():
action_speed = 80 # Speed for movement actions
try:
# Stand up slowly at 40% speed to reduce current spikes
crawler.do_step('stand', 40)
sleep(1.0)
# Continuous action loop
while True:
crawler.do_step(stand_step, action_speed)
sleep(3)
crawler.do_step(new_step, action_speed)
sleep(3)
except KeyboardInterrupt:
# Handle Ctrl+C for safe exit
print("\nExiting safely...")
finally:
# Return to sitting position before shutting down
try:
crawler.do_step('sit', 40)
sleep(1.0)
except Exception:
pass
if __name__ == "__main__":
main()
Come Funziona?
In questo codice, la parte che devi considerare con attenzione è crawler.do_step().
Simile a do_action(), do_step() può manipolare il comportamento del PiCrawler.
La differenza è che il primo può eseguire un comportamento continuo come move forward, mentre il secondo può essere usato per gesti separati come stand e sit.
Ha due utilizzi principali:
Primo: Può scrivere stringhe, utilizzando direttamente il dizionario step_list nella libreria picrawler.
crawler.do_step('stand',speed)
# "speed" indica la velocità del passo, con un intervallo compreso tra 0~100.
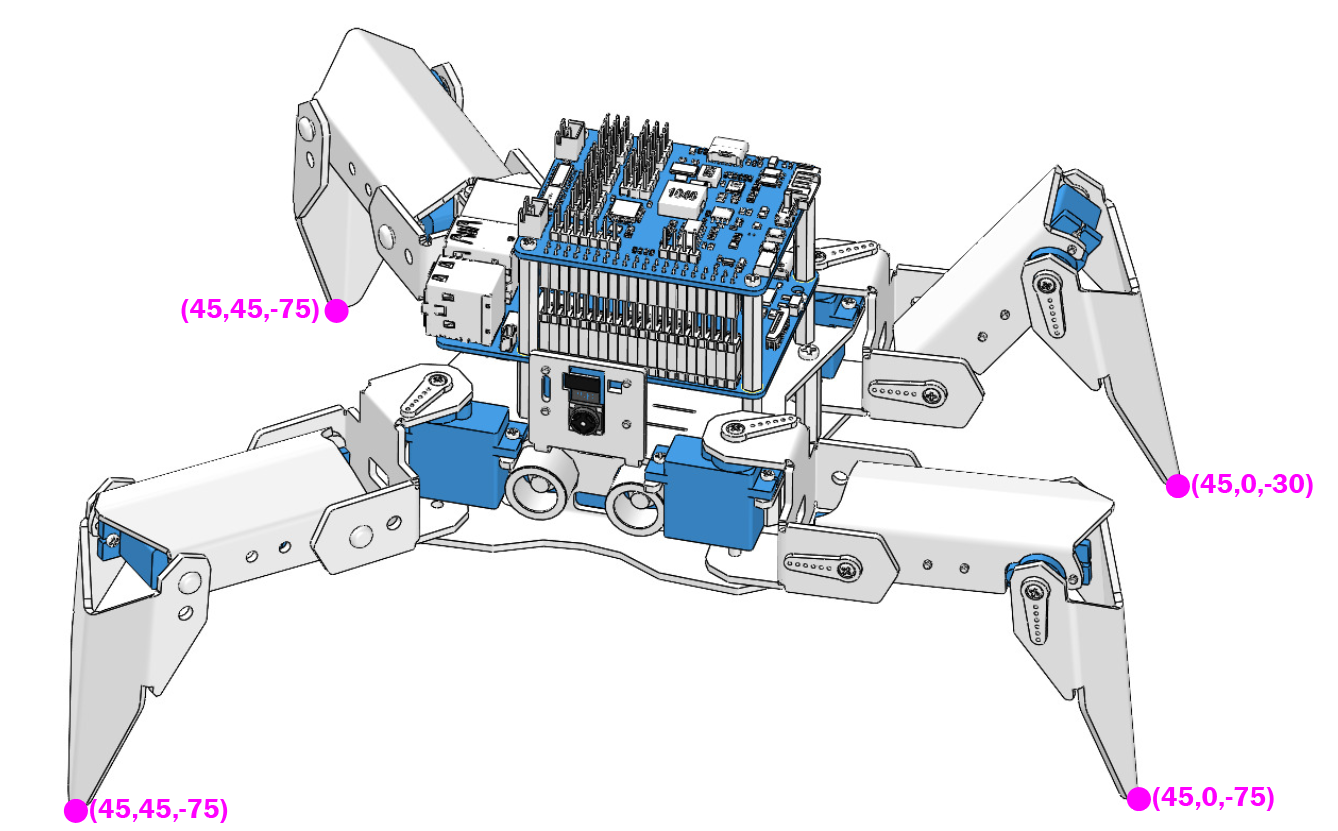
Secondo: Può anche scrivere un array di 4 valori di coordinate.
new_step=[[45, 45, -75], [45, 0, -75], [45, 0, -30], [45, 45, -75]]
# Queste quattro coordinate controllano rispettivamente le gambe: anteriore destra, anteriore sinistra, posteriore sinistra e posteriore destra.
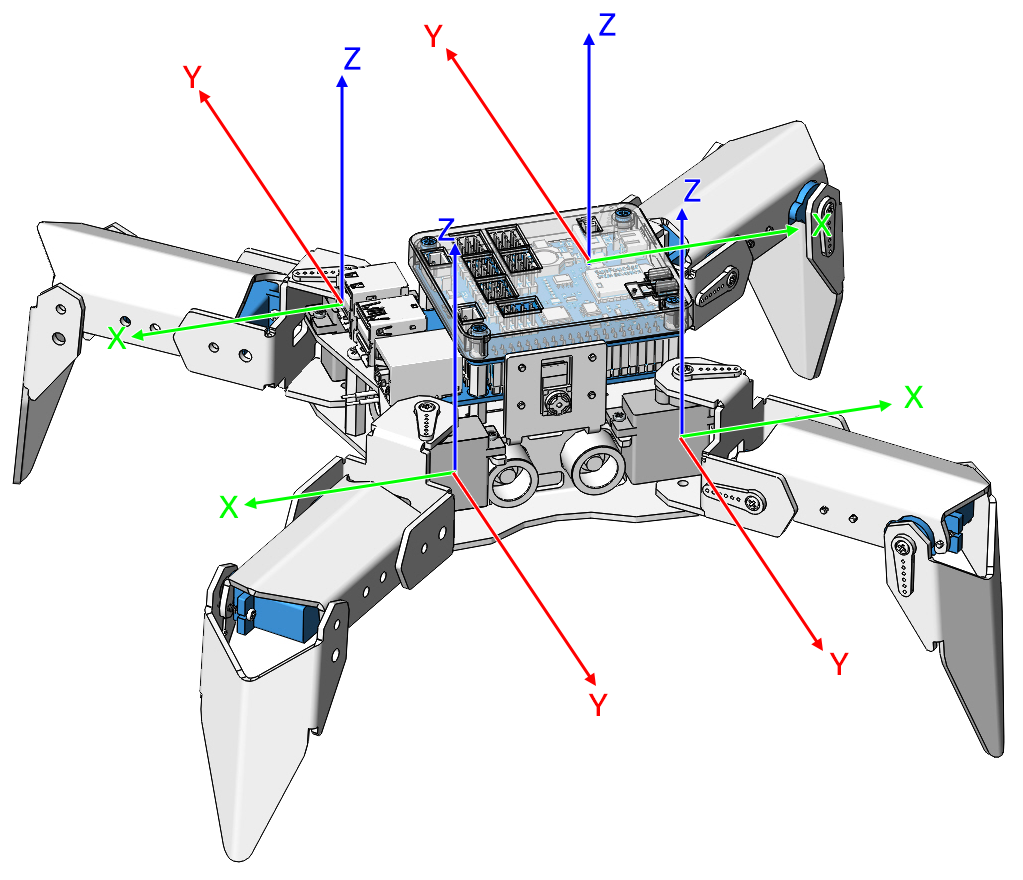
Ogni piede ha un sistema di coordinate indipendente. Come mostrato nella figura sottostante:
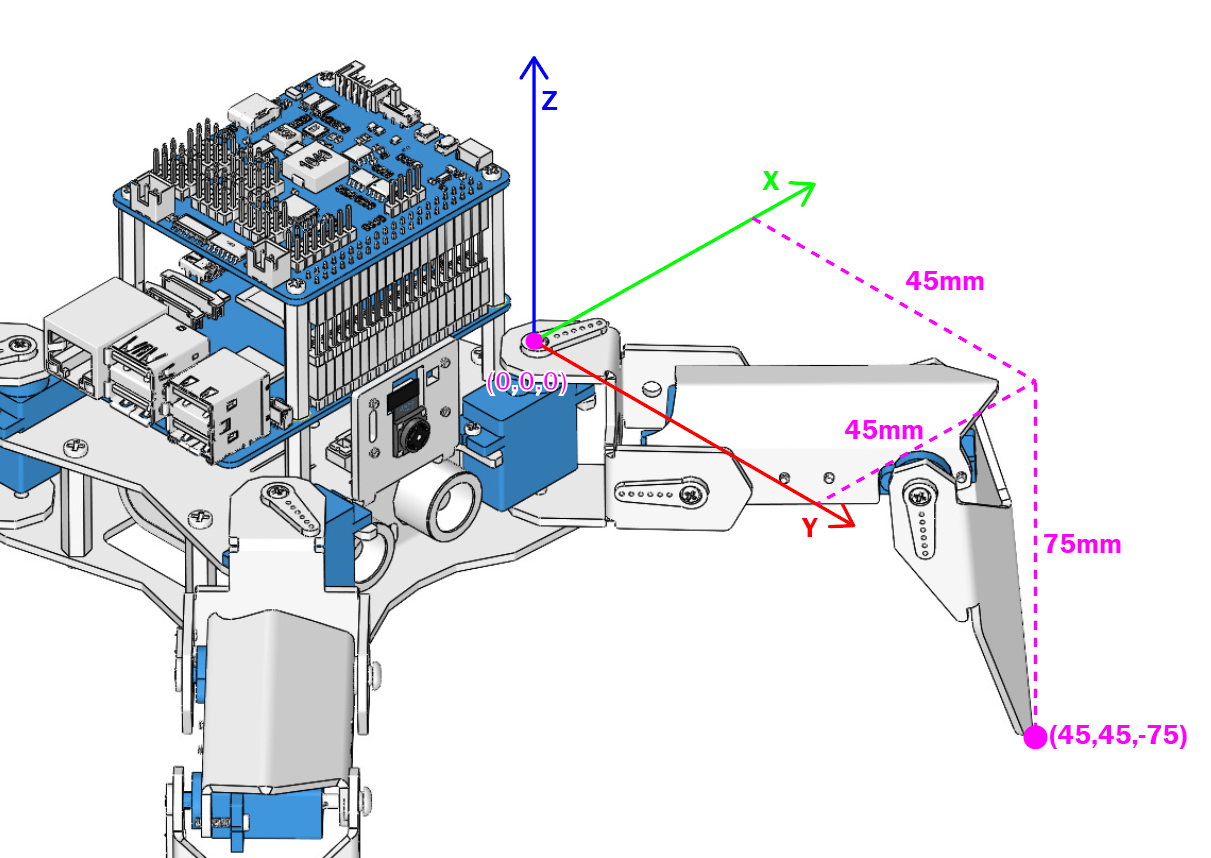
Devi misurare le coordinate di ciascun piede individualmente. Come mostrato qui sotto:
Nota: Il step_list utilizzato nel primo metodo è composto da un array che contiene 4 valori di coordinate.
step_list = {
"stand":[
[45, 45, -50],
[45, 45, -50],
[45, 45, -50],
[45, 45, -50]
],
"sit":[
[45, 45, -30],
[45, 45, -30],
[45, 45, -30],
[45, 45, -30]
],
}