Nota
Ciao, benvenuto nella Community di SunFounder Raspberry Pi & Arduino & ESP32 su Facebook! Approfondisci il mondo di Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirti a noi?
Supporto Esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e Condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime Esclusive: Ottieni accesso anticipato a nuovi annunci di prodotti e anteprime.
Sconti Speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni Festive e Giveaway: Partecipa a promozioni e concorsi durante le festività.
👉 Pronto a esplorare e creare con noi? Clicca [qui] e unisciti oggi stesso!
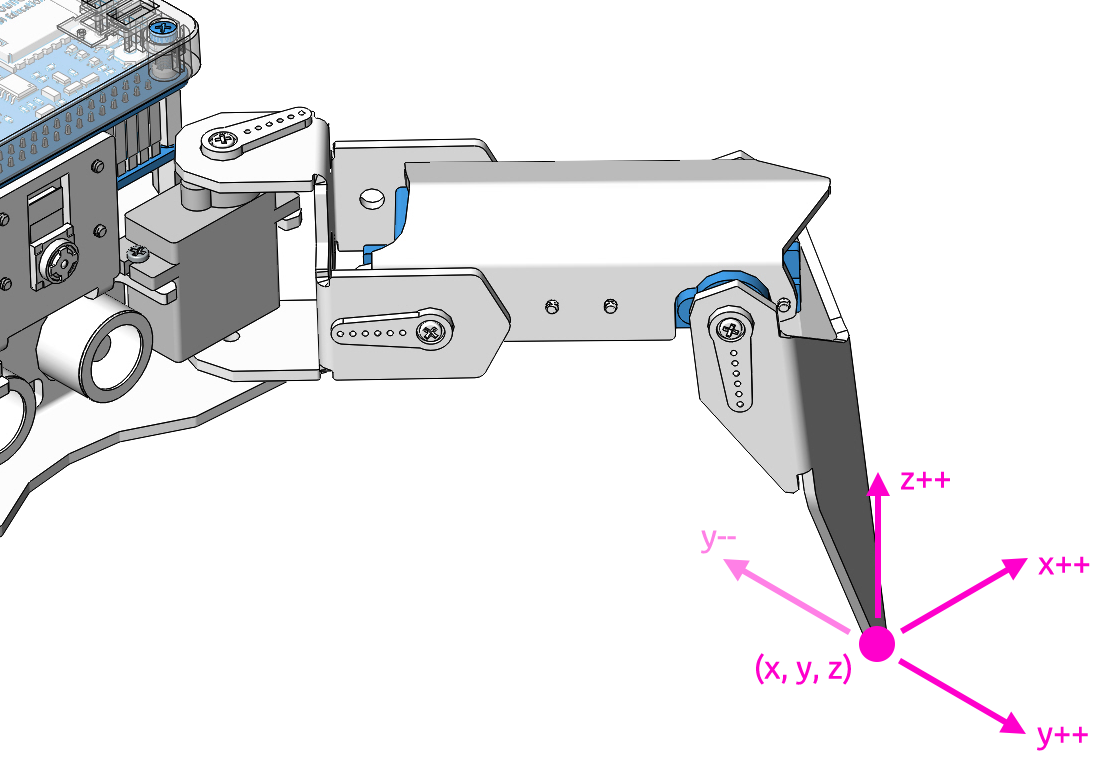
Regolare la Postura
In questo esempio utilizzeremo la tastiera per controllare il PiCrawler, piede per piede, e impostare la postura desiderata.
Puoi premere la barra spaziatrice per stampare i valori attuali delle coordinate. Questi valori delle coordinate saranno utili per creare azioni uniche per il PiCrawler.
Esegui il Codice
cd ~/picrawler/examples
sudo python3 do_single_leg.py
Dopo l’esecuzione del codice, segui le istruzioni visualizzate nel terminale:
Premi
1234per selezionare i piedi separatamente:1: piede anteriore destro,2: piede anteriore sinistro,3: piede posteriore sinistro,4: piede posteriore destro.Premi
w,a,s,d,refper controllare lentamente i valori delle coordinate del PiCrawler.Premi
Ctrl+Cper uscire.
Codice
#!/usr/bin/env python3
from picrawler import Picrawler
from time import sleep
import readchar
crawler = Picrawler()
SPEED = 80
STEP_SIZE = 2
manual = '''
-------- PiCrawler Controller ---------
....... .......
<=| 2 |┌-┌┐┌┐-┐| 1 |=>
``````` ├ ┤ ```````
....... ├ ┤ .......
<=| 3 |└------┘| 4 |=>
``````` ```````
1: Select right front leg
2: Select left front leg
3: Select left rear leg
4: Select right rear leg
W: Y++ R: Z++
A: X-- F: Z--
S: Y--
D: X++ Ctrl+C: Quit
'''
legs_list = ['right front', 'left front', 'left rear', 'right rear']
# Axis mapping for cleaner logic
move_map = {
'w': (1, +STEP_SIZE), # Y++
's': (1, -STEP_SIZE), # Y--
'a': (0, -STEP_SIZE), # X--
'd': (0, +STEP_SIZE), # X++
'r': (2, +STEP_SIZE), # Z++
'f': (2, -STEP_SIZE), # Z--
}
def clear_screen():
print("\033[H\033[J", end='')
def show_info(selected_leg, coordinate):
clear_screen()
print(manual)
print(f"Selected leg: {selected_leg + 1} - {legs_list[selected_leg]}")
print(f"Coordinate: {coordinate}")
def main():
selected_leg = 0
try:
print(manual)
# Stand up first
crawler.do_step('stand', 40)
sleep(0.5)
# Get current coordinates
coordinate = crawler.current_step_all_leg_value()
show_info(selected_leg, coordinate)
while True:
key = readchar.readkey().lower()
# Select leg
if key in ('1', '2', '3', '4'):
selected_leg = int(key) - 1
show_info(selected_leg, coordinate)
# Move selected leg
elif key in move_map:
axis, delta = move_map[key]
# Update coordinate
coordinate[selected_leg][axis] += delta
# Send updated position
crawler.do_single_leg(selected_leg, coordinate[selected_leg], SPEED)
sleep(0.1)
show_info(selected_leg, coordinate)
sleep(0.05)
except KeyboardInterrupt:
print("\nExiting safely...")
finally:
# Return to sitting position on exit
try:
crawler.do_step('sit', 40)
sleep(1)
except Exception:
pass
print("Robot is now sitting. Program ended.")
if __name__ == "__main__":
main()
current_step_all_leg_value(): Restituisce i valori delle coordinate di tutte le gambe.do_single_leg(leg,coordinate[leg],speed): Modifica individualmente il valore della coordinata di una determinata gamba.