Note
Bonjour, bienvenue dans la communauté des passionnés de Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez plus profondément dans Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez vos problèmes après-vente et vos défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et bénéficiez de découvertes exclusives.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et concours : Participez à des concours et promotions pendant les fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
Posture
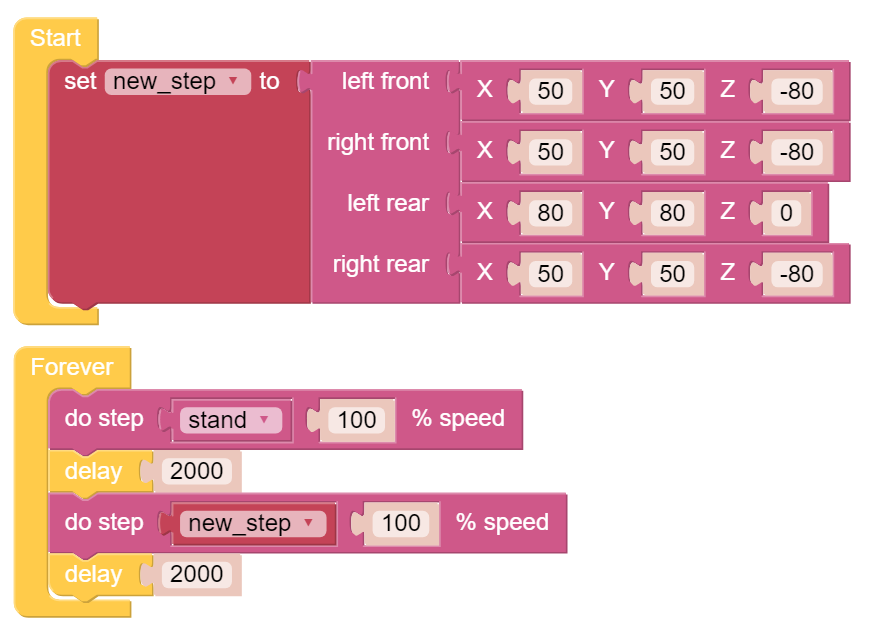
PiCrawler peut adopter une posture spécifique en écrivant un tableau de coordonnées. Ici, il prend la posture avec le pied arrière droit levé.

Programme
Note
Vous pouvez écrire le programme en suivant l’image ci-dessous, veuillez consulter le tutoriel : How to Create a New Project?.
Ou trouvez le code portant le même nom sur la page Exemples d’EzBlock Studio et cliquez directement sur Exécuter ou Modifier.
Comment ça fonctionne ?
Dans ce code, l’élément à surveiller est do step.
Il a deux usages :
Il peut directement utiliser stand ou sit.
Il peut également écrire un tableau de 4 valeurs de coordonnées.
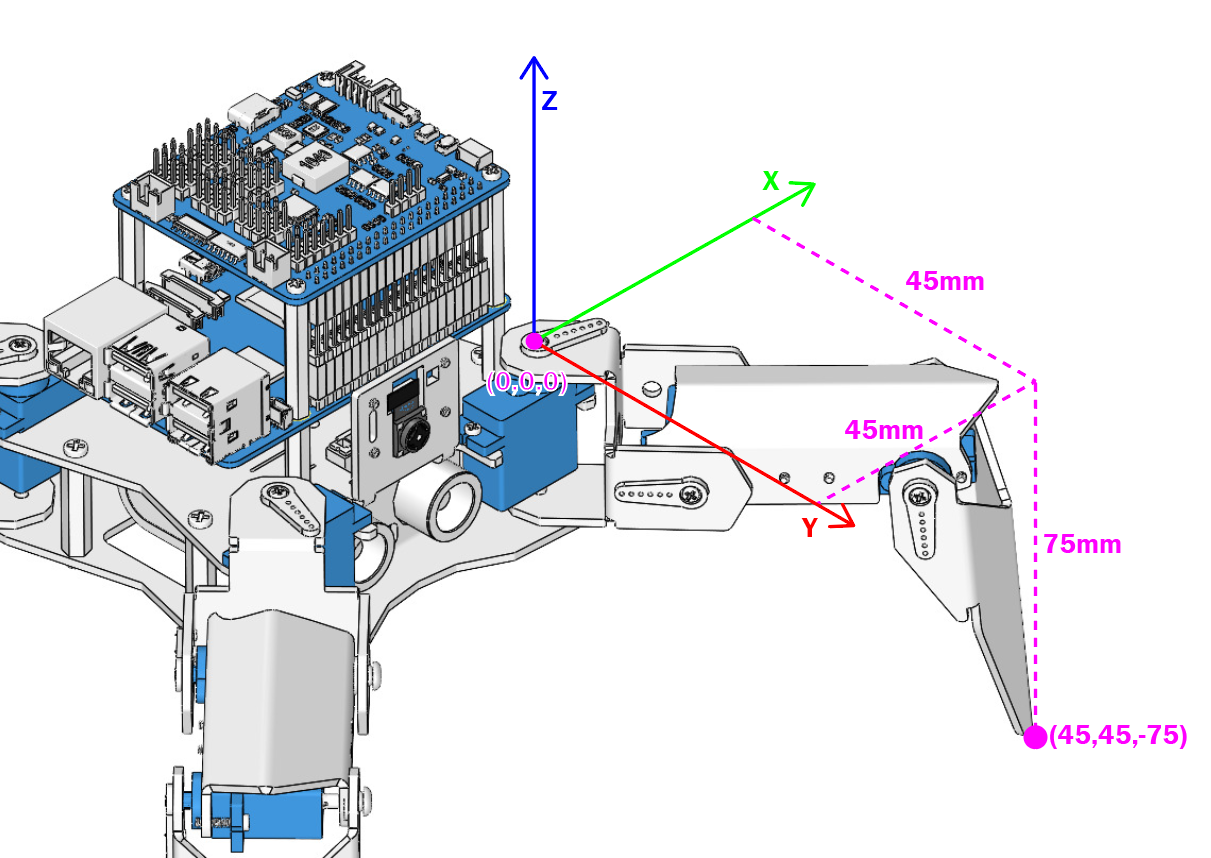
Chaque pied a un système de coordonnées indépendant. Comme montré ci-dessous :
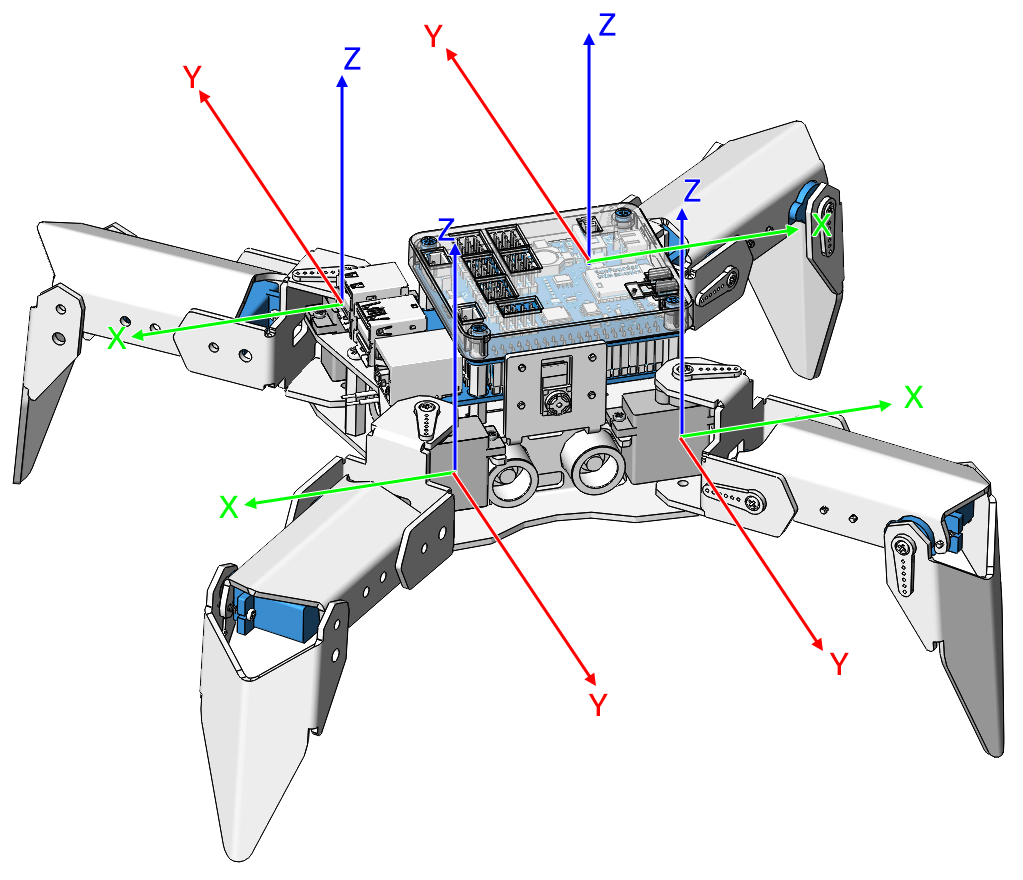
Il est nécessaire de mesurer les coordonnées de chaque orteil individuellement. Comme montré ci-dessous :