Note
Bonjour, bienvenue dans la communauté des passionnés de Raspberry Pi, Arduino et ESP32 sur Facebook ! Explorez plus en profondeur Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez vos problèmes après-vente et vos défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et bénéficiez de découvertes exclusives.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et concours : Participez à des concours et promotions pendant les fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
Vision par ordinateur
Ce projet entre officiellement dans le domaine de la vision par ordinateur !
Note
Vous pouvez consulter How to Use the Video Function?. Venez réaliser ce projet sans encombre.
Programme
Note
Vous pouvez écrire le programme en suivant l’image ci-dessous, veuillez consulter le tutoriel : How to Create a New Project?.
Ou trouvez le code portant le même nom sur la page Exemples d’EzBlock Studio et cliquez directement sur Exécuter ou Modifier.

Passez à l’interface de contrôle à distance, vous verrez les widgets suivants.
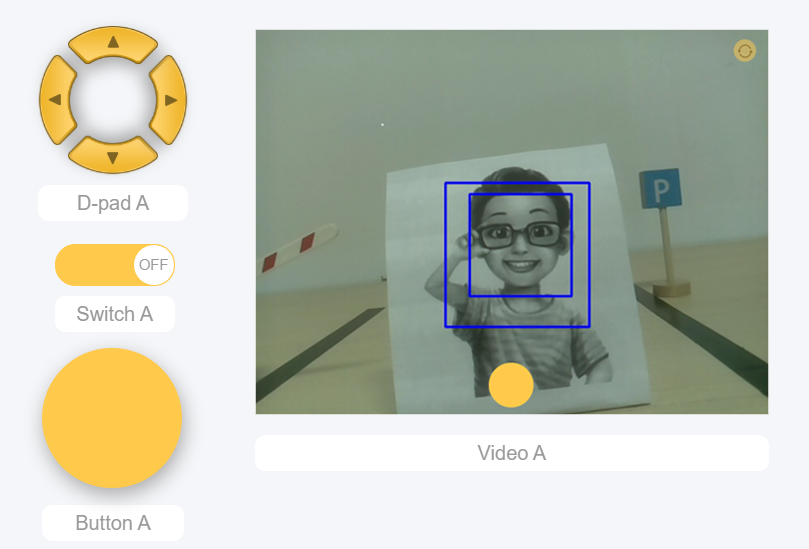
Une fois le programme lancé, vous pouvez utiliser le widget de glissement pour activer/désactiver la détection faciale ; cliquez sur le D-Pad pour sélectionner la couleur de détection ; cliquez sur le bouton pour afficher le résultat de la détection.
Comment ça fonctionne ?

Ce bloc permet d’activer le module caméra.
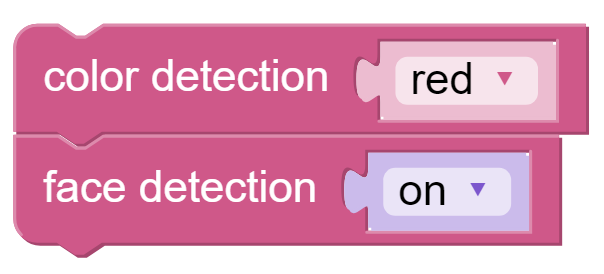
Ces deux blocs activent la fonction de détection faciale/détection de couleur.
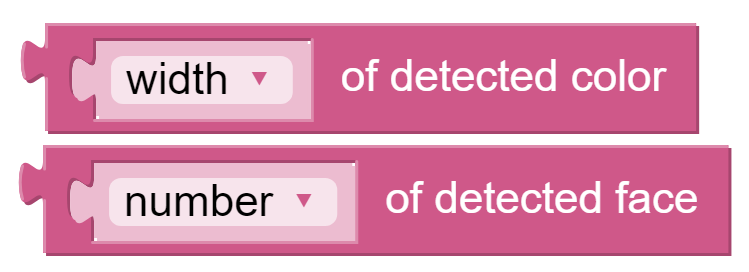
Ces deux blocs permettent d’afficher les informations. Le résultat de la détection a cinq valeurs de sortie : la valeur des coordonnées x, la valeur des coordonnées y, la largeur, la hauteur et le nombre.