Note
Bonjour, bienvenue dans la communauté des passionnés de Raspberry Pi, Arduino et ESP32 sur Facebook ! Explorez plus en profondeur Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez vos problèmes après-vente et vos défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et bénéficiez de découvertes exclusives.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et concours : Participez à des concours et promotions pendant les fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
Évitement d’obstacles
Dans ce projet, le PiCrawler utilise un module ultrason pour détecter les obstacles devant lui. Lorsqu’il détecte un obstacle, le PiCrawler envoie un signal et cherche une autre direction pour avancer.
Programme
Note
Vous pouvez écrire le programme selon l’image ci-dessous, veuillez consulter le tutoriel : How to Create a New Project?.
Ou trouvez le code portant le même nom sur la page Exemples d’EzBlock Studio et cliquez directement sur Exécuter ou Modifier.
Comment ça fonctionne ?
Vous pouvez trouver les blocs suivants dans la catégorie Module pour réaliser la détection de distance :
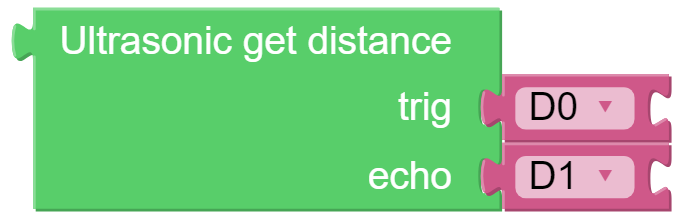
Il convient de noter que les deux broches du bloc doivent correspondre au câblage réel, à savoir trig-D2, echo-D3.
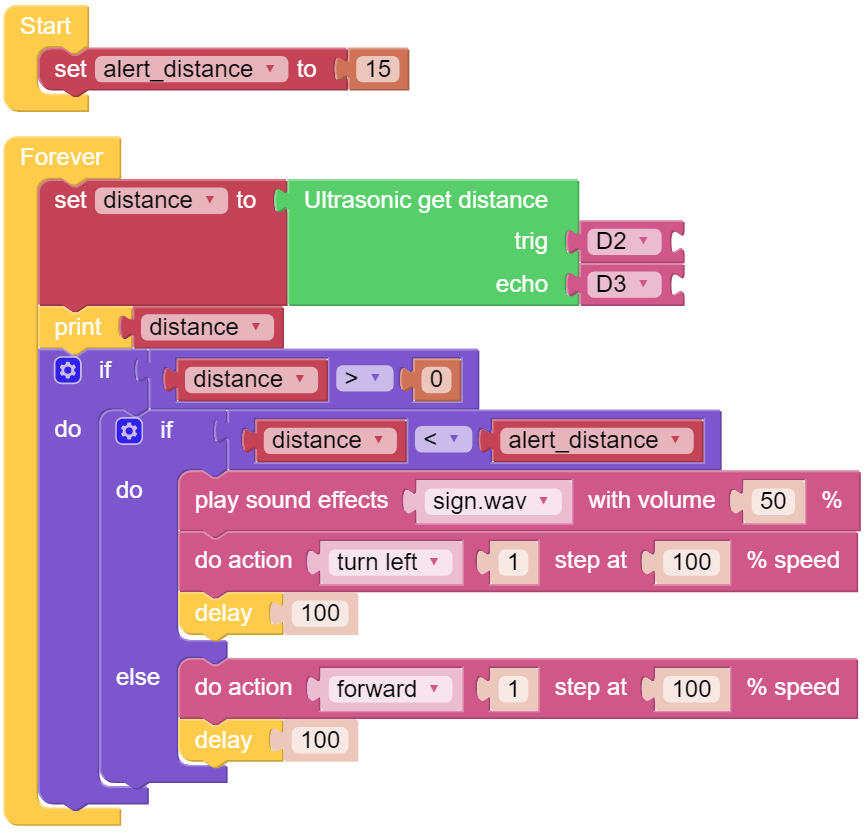
Voici le programme principal.
Lire la
distancedétectée par le module ultrason et filtrer les valeurs inférieures à 0 (lorsque le module ultrason est trop éloigné de l’obstacle ou qu’il ne peut pas lire les données correctement,distance<0apparaîtra).Lorsque la
distanceest inférieure àalert_distance(la valeur seuil définie précédemment, qui est de 10), jouer l’effet sonoresign.wav. Le PiCrawler effectue unerotation à gauche.Lorsque la
distanceest supérieure àalert_distance, le PiCrawler avancetout droit.