Note
Bonjour, bienvenue dans la communauté des passionnés de Raspberry Pi, Arduino et ESP32 sur Facebook ! Explorez plus en profondeur Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi rejoindre ?
Support d’experts : Résolvez vos problèmes après-vente et vos défis techniques avec l’aide de notre communauté et de notre équipe.
Apprendre et partager : Échangez des astuces et des tutoriels pour améliorer vos compétences.
Aperçus exclusifs : Accédez en avant-première aux annonces de nouveaux produits et bénéficiez de découvertes exclusives.
Réductions spéciales : Profitez de réductions exclusives sur nos produits les plus récents.
Promotions festives et concours : Participez à des concours et promotions pendant les fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [ici] et rejoignez-nous dès aujourd’hui !
Enregistrer un Nouveau Pas
Nous utilisons la fonction de télécommande pour contrôler PiCrawler afin qu’il effectue plusieurs postures successivement, puis enregistrer ces postures. Vous pourrez ensuite les rejouer.
Programme
Note
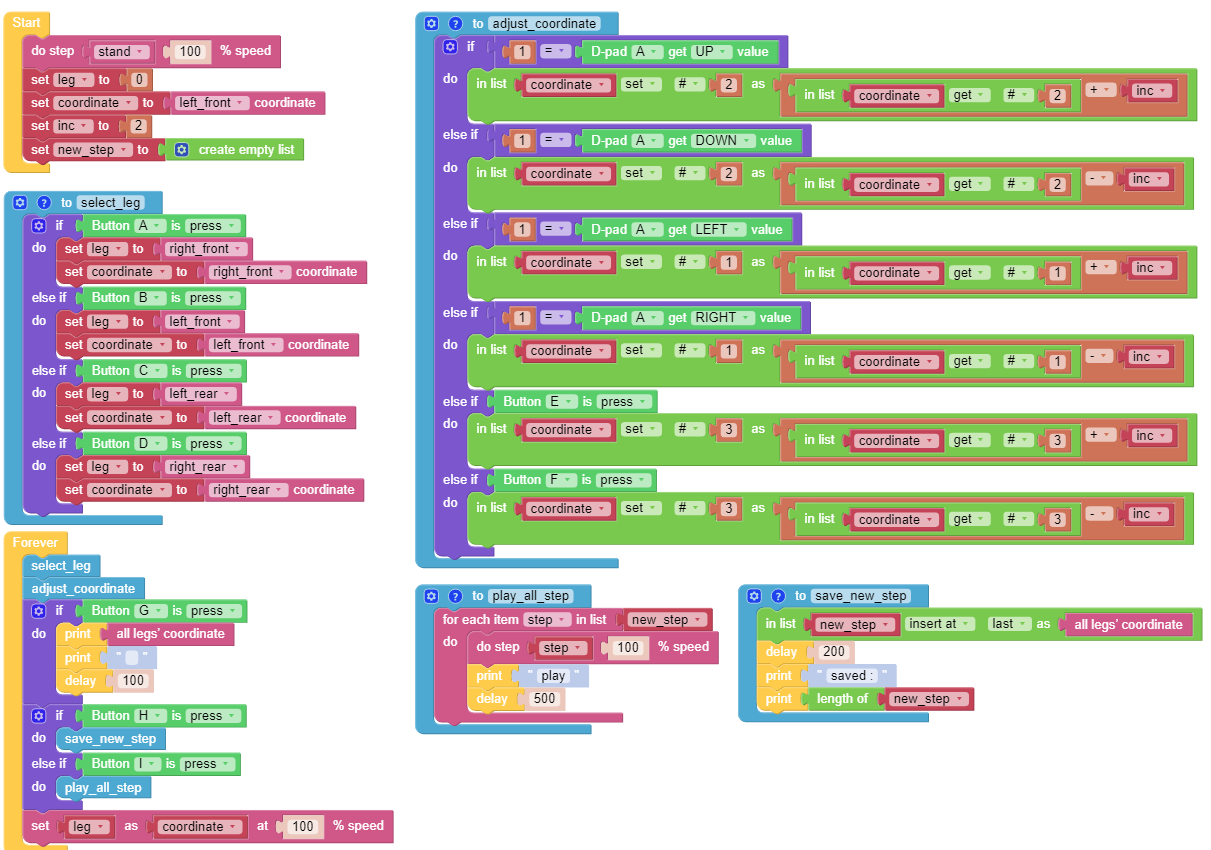
Vous pouvez écrire le programme en suivant l’image ci-dessous, veuillez consulter le tutoriel : How to Create a New Project?.
Ou trouvez le code portant le même nom sur la page Exemples d’EzBlock Studio et cliquez directement sur Exécuter ou Modifier.
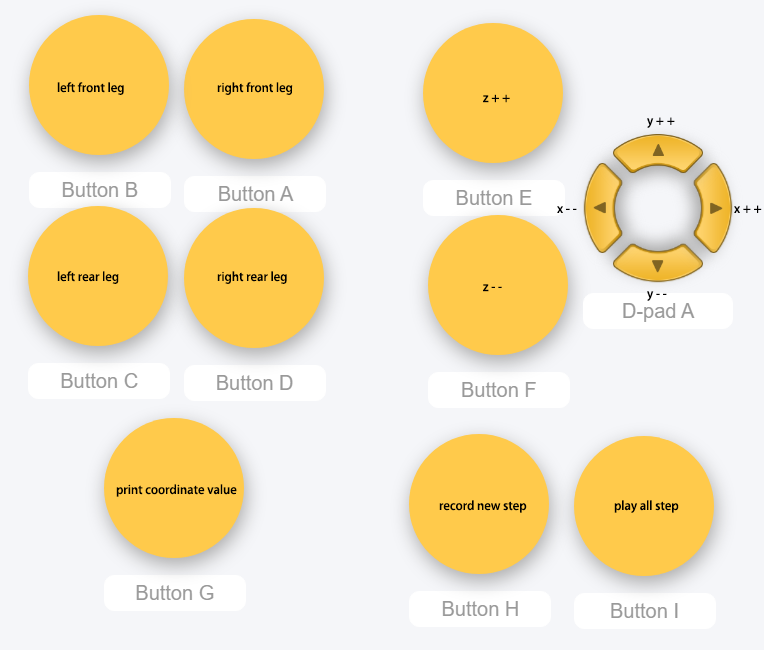
Passez à l’interface de contrôle à distance et vous verrez les widgets suivants.
Comment ça fonctionne ?
Ce projet est basé sur Ajuster la posture. Des fonctions d’enregistrement et de lecture ont été ajoutées.
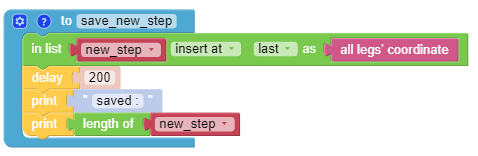
La fonction d’enregistrement est mise en œuvre par le code suivant.
La fonction de lecture est mise en œuvre par le code suivant.
