Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie gemeinsam mit anderen Enthusiasten tiefer in die Welt von Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und bewältigen Sie technische Herausforderungen mit der Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu erweitern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezielle Rabatte: Profitieren Sie von exklusiven Angeboten für unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Verlosungen und saisonalen Aktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [hier] und treten Sie noch heute bei!
Pose
PiCrawler kann eine bestimmte Haltung einnehmen, indem ein Koordinatenarray geschrieben wird. Hier wird eine Haltung mit angehobenem rechten Hinterfuß eingenommen.

Programm
Bemerkung
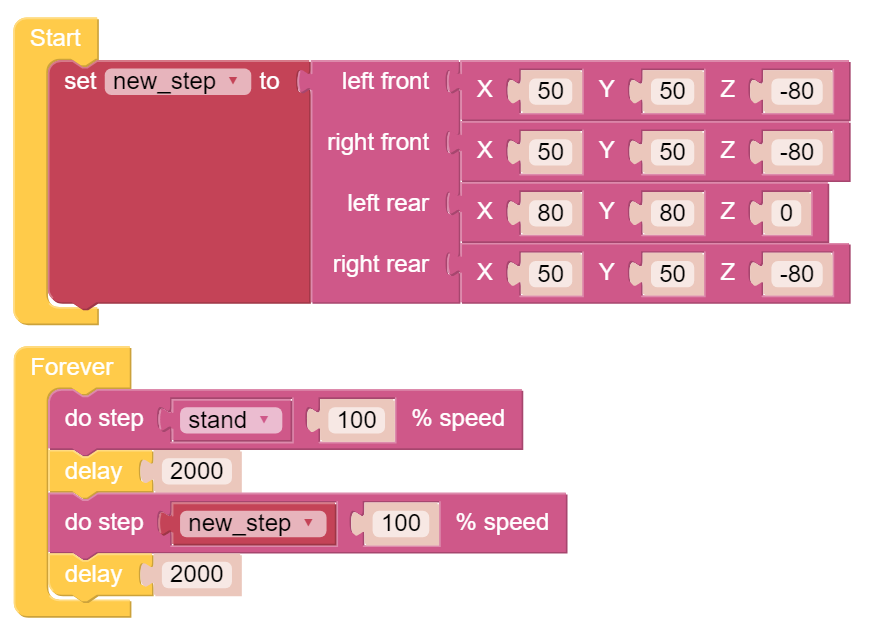
Sie können das Programm gemäß der folgenden Abbildung schreiben. Bitte folgen Sie dem Tutorial: How to Create a New Project?.
Oder suchen Sie den gleichnamigen Code auf der Beispiele-Seite von EzBlock Studio und klicken Sie direkt auf Ausführen oder Bearbeiten.
Wie funktioniert es?
In diesem Code ist der Abschnitt do step besonders wichtig.
Er hat zwei Hauptfunktionen:
Er kann direkt mit den Befehlen stand (stehen) oder sit (sitzen) verwendet werden.
Er ermöglicht das Schreiben eines Arrays mit 4 Koordinatenwerten.
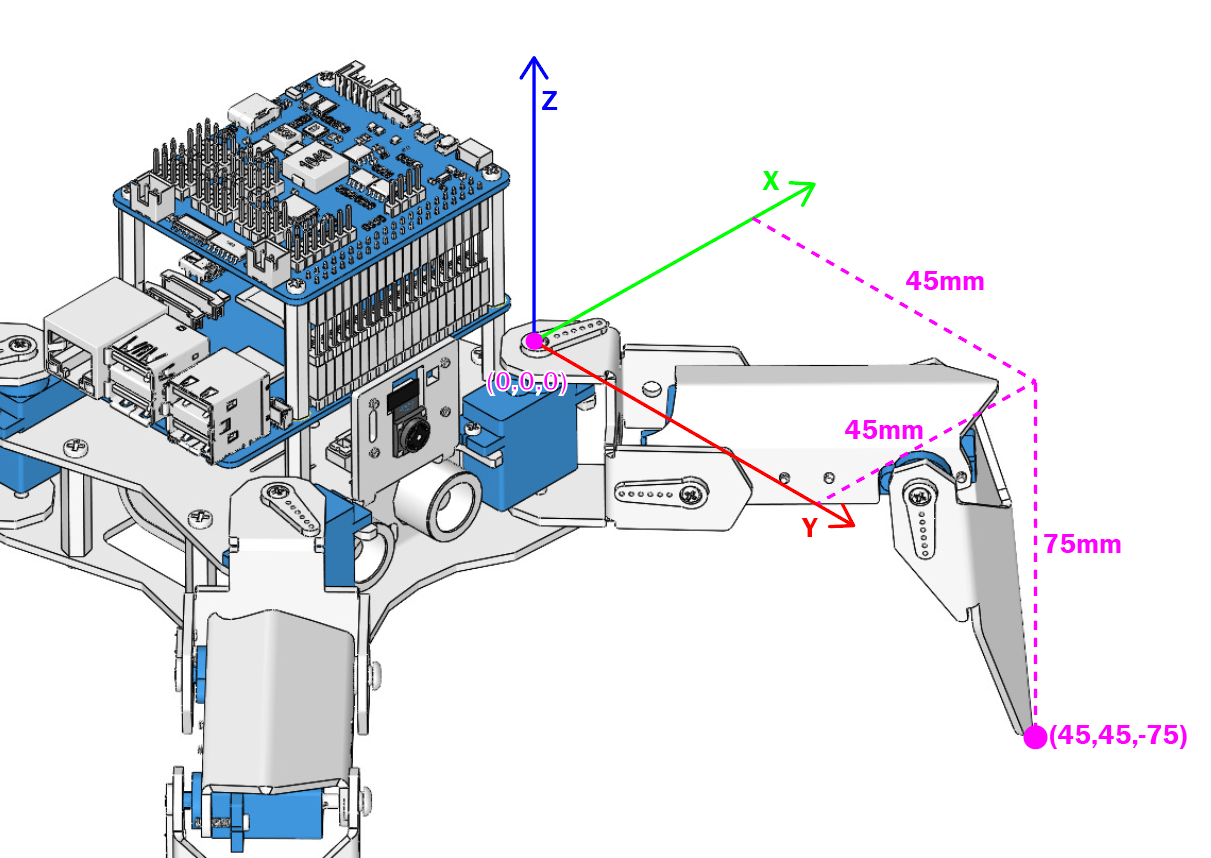
Jeder Fuß hat ein eigenes Koordinatensystem. Dies wird in der folgenden Abbildung dargestellt:
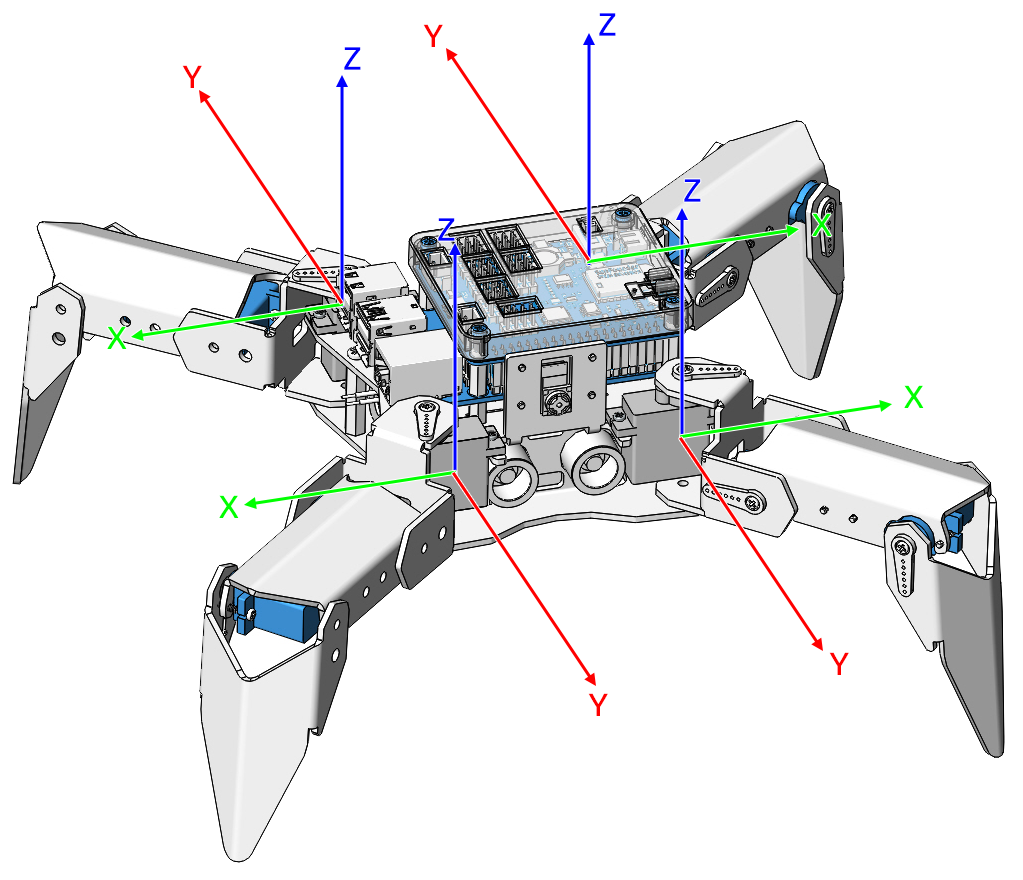
Sie müssen die Koordinaten jedes einzelnen Zehs individuell messen. Wie unten gezeigt: