Bemerkung
Hallo, willkommen in der SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasten-Community auf Facebook! Tauchen Sie gemeinsam mit anderen Enthusiasten tiefer in die Welt von Raspberry Pi, Arduino und ESP32 ein.
Warum beitreten?
Expertenunterstützung: Lösen Sie Probleme nach dem Kauf und bewältigen Sie technische Herausforderungen mit der Hilfe unserer Community und unseres Teams.
Lernen & Teilen: Tauschen Sie Tipps und Tutorials aus, um Ihre Fähigkeiten zu erweitern.
Exklusive Vorschauen: Erhalten Sie frühzeitigen Zugang zu neuen Produktankündigungen und exklusiven Einblicken.
Spezielle Rabatte: Profitieren Sie von exklusiven Angeboten für unsere neuesten Produkte.
Festliche Aktionen und Gewinnspiele: Nehmen Sie an Verlosungen und saisonalen Aktionen teil.
👉 Bereit, mit uns zu entdecken und zu gestalten? Klicken Sie auf [hier] und treten Sie noch heute bei!
Kalibrierung des PiCrawler
Nach dem Anschließen des PiCrawler folgt ein Kalibrierungsschritt. Dies ist notwendig, da es durch mögliche Abweichungen beim Zusammenbau oder durch Beschränkungen der Servos selbst zu geringfügigen Abweichungen der Servo-Winkel kommen kann. In diesem Schritt können Sie diese kalibrieren.
Falls Sie jedoch der Meinung sind, dass die Montage perfekt ist und keine Kalibrierung erforderlich ist, können Sie diesen Schritt auch überspringen.
Bemerkung
Wenn Sie den Roboter während der Nutzung erneut kalibrieren möchten, folgen Sie bitte den untenstehenden Schritten.
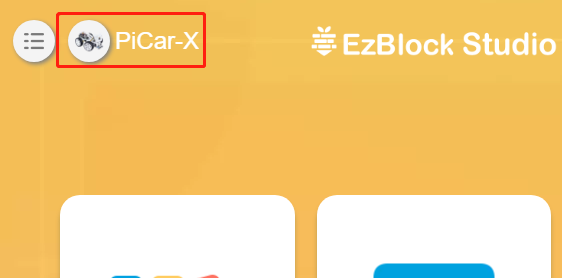
Sie können die Produktdetailseite öffnen, indem Sie auf das Verbindungssymbol in der oberen linken Ecke klicken.
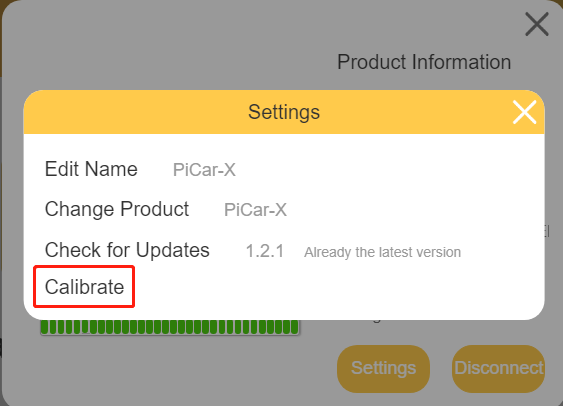
Klicken Sie auf die Schaltfläche Einstellungen.

Auf dieser Seite können Sie den Produktnamen und Produkttyp ändern, die App-Version anzeigen oder den Roboter kalibrieren. Sobald Sie auf Kalibrieren klicken, gelangen Sie zur Kalibrierungsseite.
Die Kalibrierungsschritte sind wie folgt:
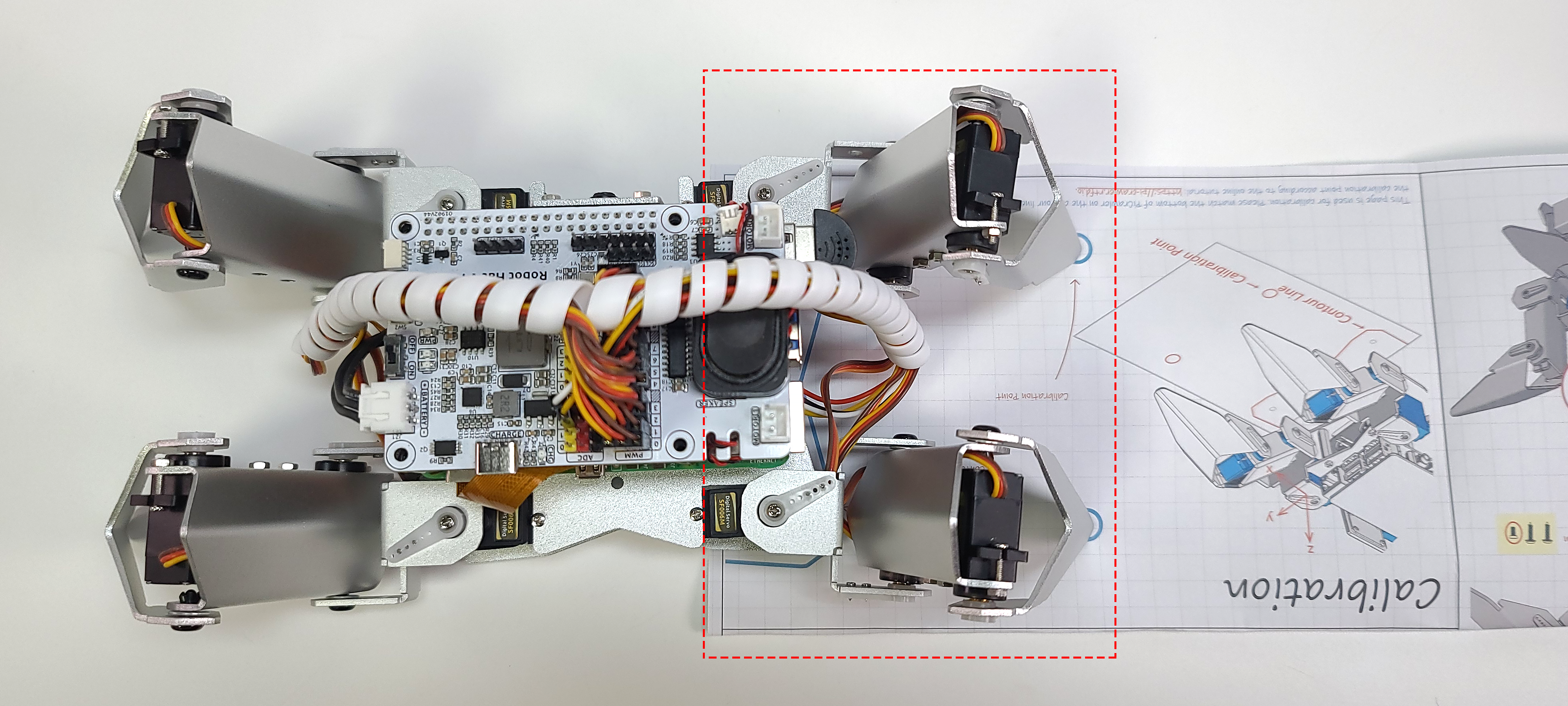
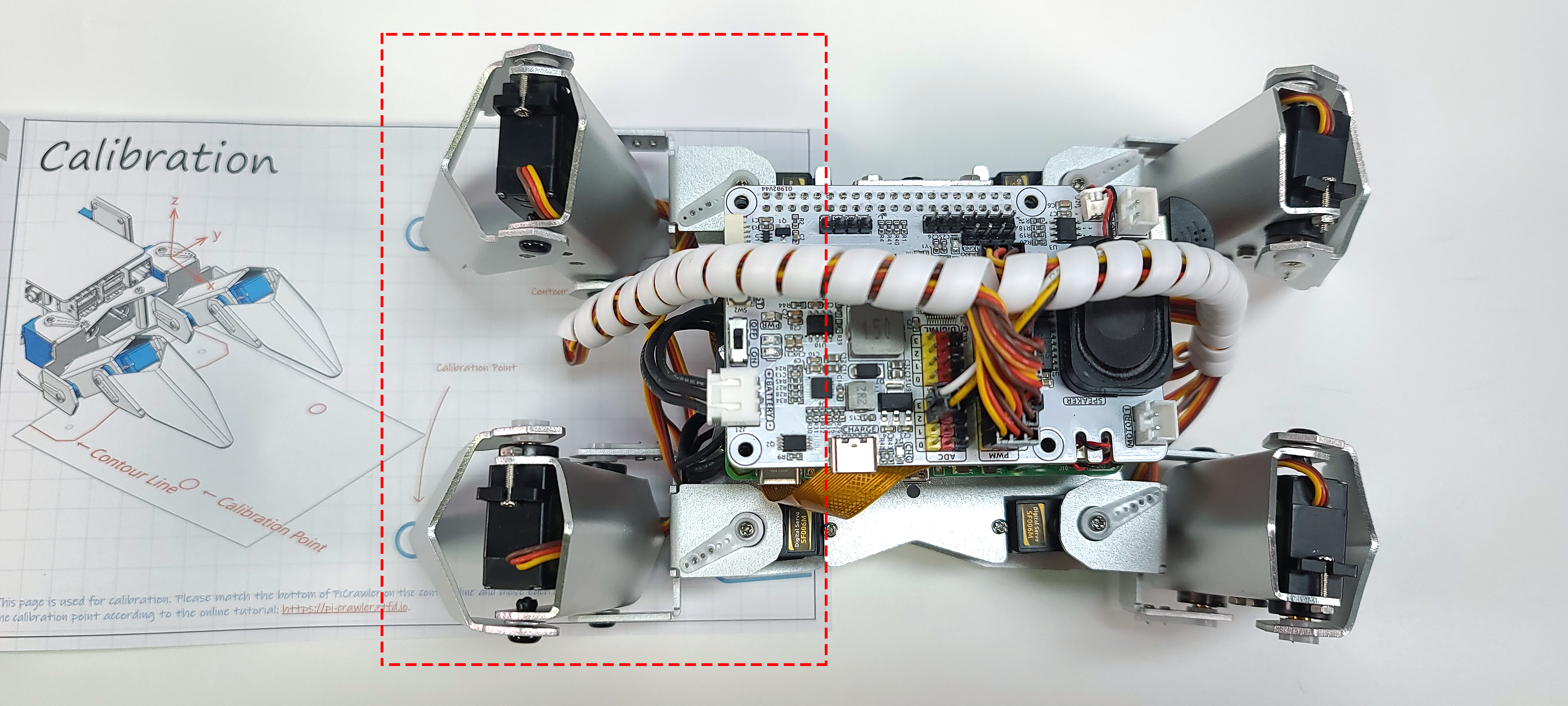
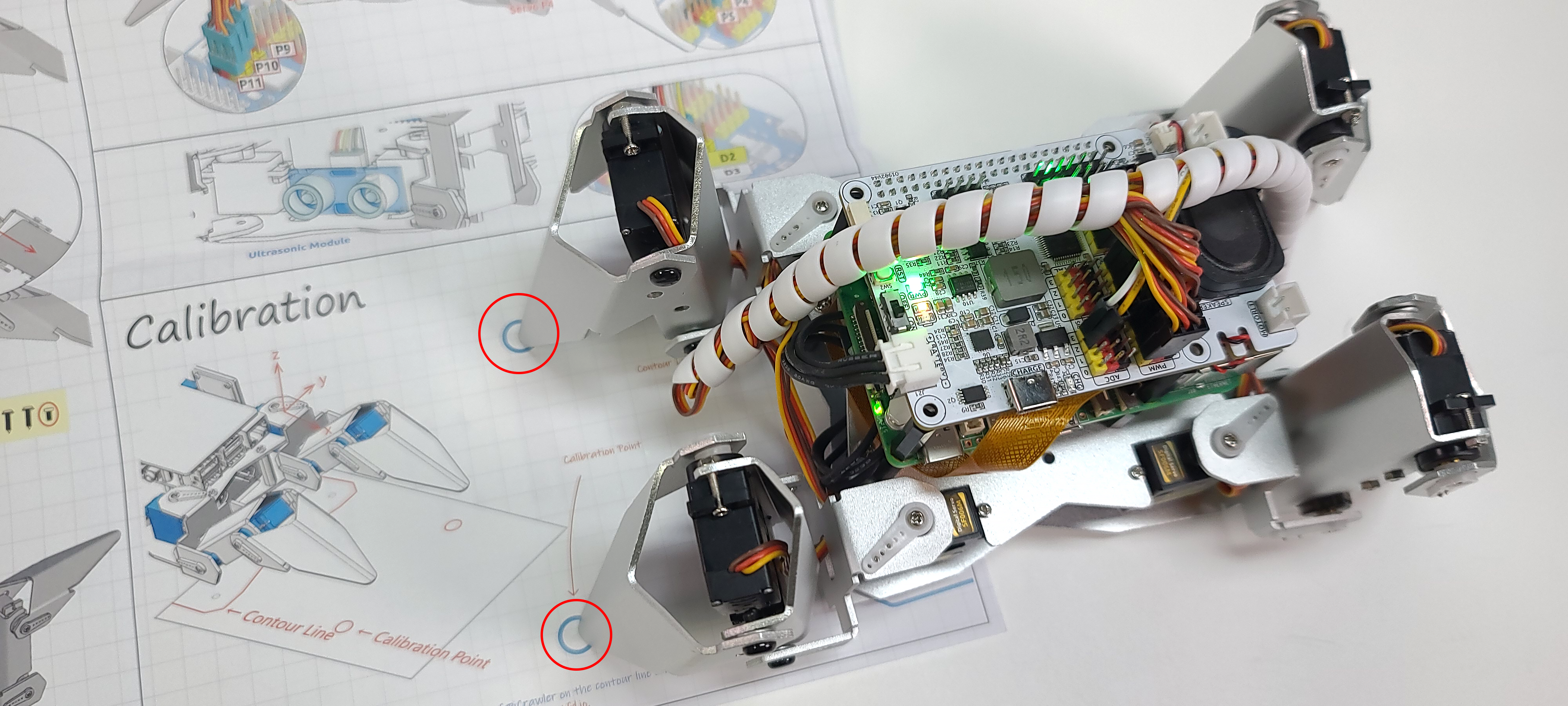
Nehmen Sie das Montageblatt heraus, schlagen Sie die letzte Seite auf und legen Sie es flach auf den Tisch. Platzieren Sie dann den PiCrawler wie unten gezeigt, wobei sein Unterteil mit der Umrisslinie auf der Kalibrierungsvorlage ausgerichtet ist.
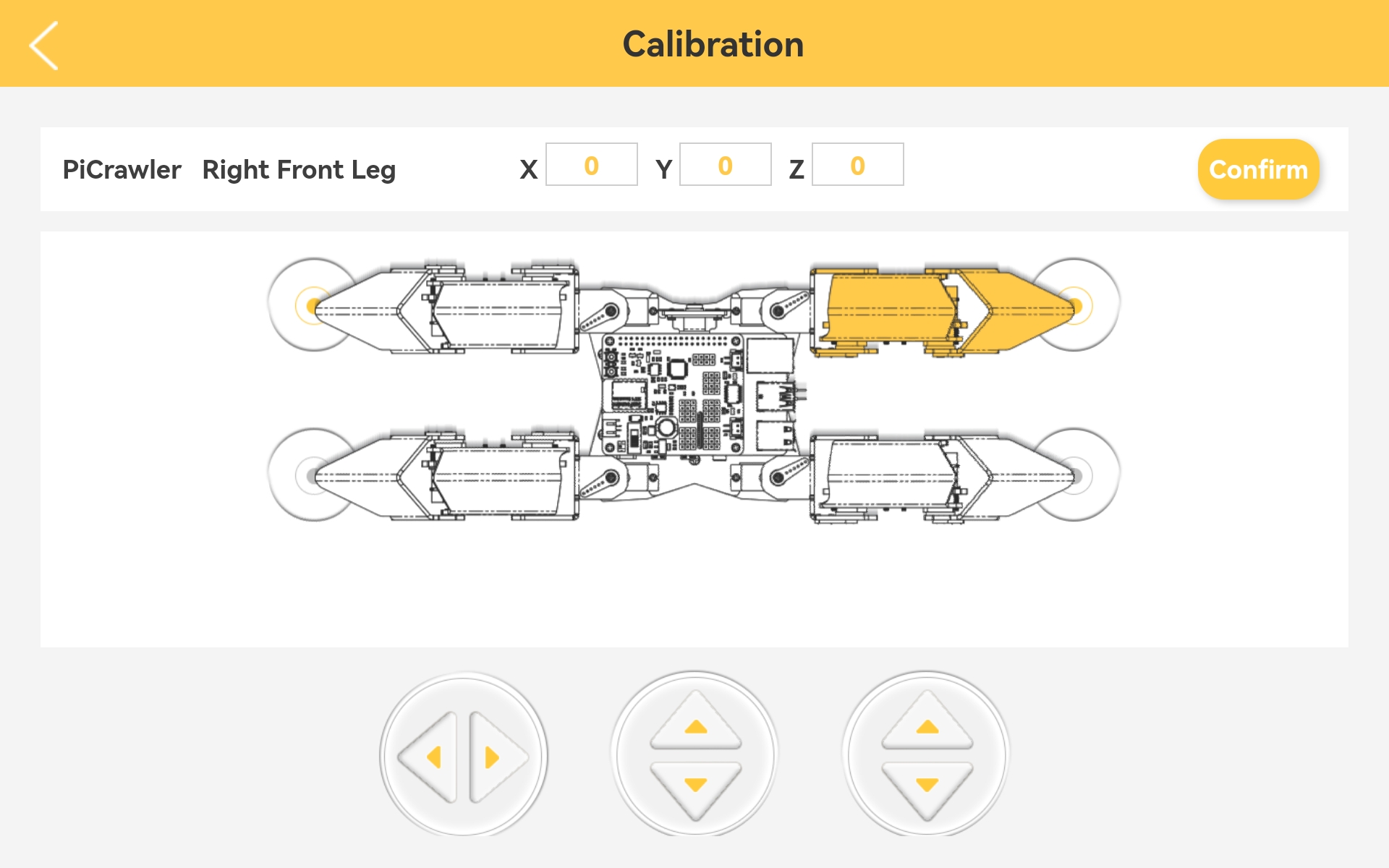
Gehen Sie zurück zu EzBlock Studio, wählen Sie einen Fuß auf der linken Seite aus, klicken Sie dann auf die 3 Sets von X-, Y- und Z-Tasten, und lassen Sie die Zehen langsam mit dem Kalibrierungspunkt ausrichten.
Die Kalibrierungstasten dienen zur Feineinstellung. Sie müssen diese Tasten mehrmals drücken, um eine Positionsänderung der Pins zu erkennen.
Es wird empfohlen, zuerst die Aufwärts-Taste der Z-Achse zu drücken, um den Fuß anzuheben, und dann X und Y einzustellen.
Richten Sie den anderen Fuß auf der linken Seite auf die gleiche Weise aus.
Nach der Kalibrierung der beiden linken Füße wechseln Sie das Kalibrierungspapier auf die rechte Seite und kalibrieren die beiden rechten Füße entsprechend der obigen Methode.