注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.12 スマートファン
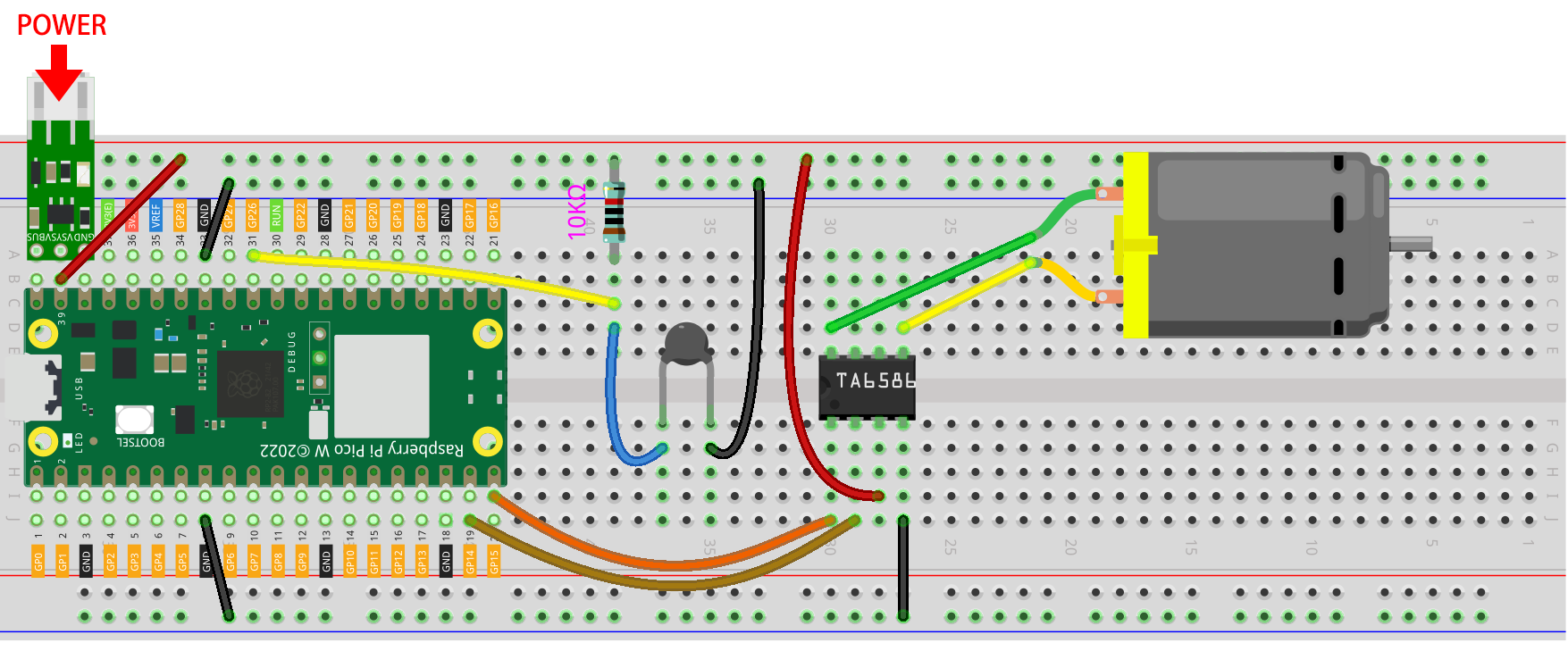
このプロジェクトでは、サーミスター、TA6586、モーター、および電源モジュールを使用して、温度制御型のスマートファンを作成します。設定温度に達すると、ファンは自動的に回転します。
このプロジェクトで必要なコンポーネントは以下の通りです。
一式を購入する方が便利です、リンクはこちら:
名前 |
このキットに含まれるアイテム |
リンク |
|---|---|---|
Kepler Kit |
450+ |
以下のリンクから個々にも購入できます。
SN |
コンポーネント |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1 |
||
6 |
1 |
||
7 |
1 |
||
8 |
パワーパック |
1 |
|
9 |
バッテリーホルダー |
1 |
|
10 |
1(10KΩ) |
||
11 |
1 |
配線
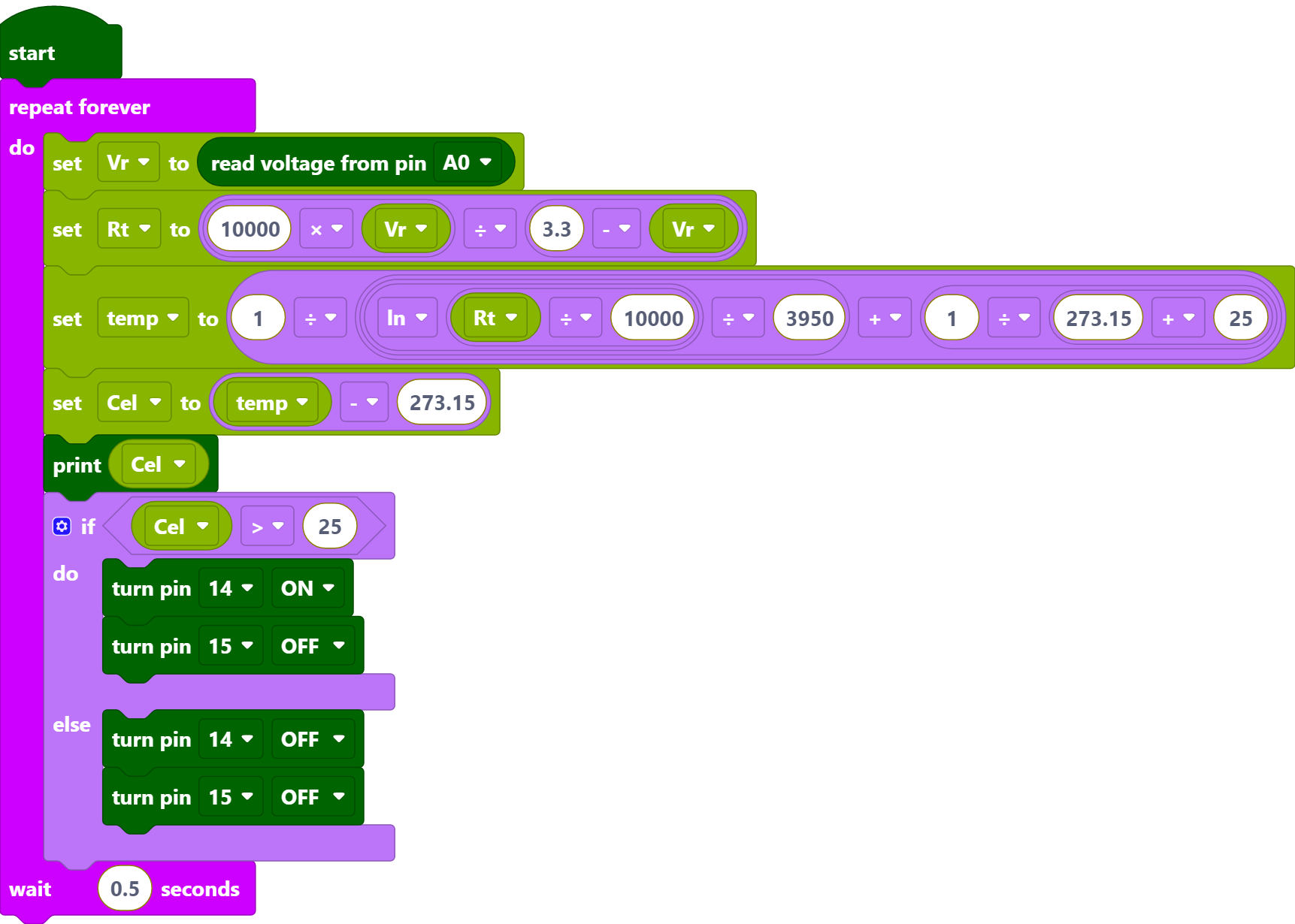
コード
注釈
以下の画像を参照して、ドラッグアンドドロップでコードを作成できます。
kepler-kit-main\piperのパスから2.12_smart_fan.png.pngをインポートしてください。詳細なチュートリアルは、 コードをインポート を参照してください。
Pico Wに接続した後、 スタート ボタンをクリックしてコードが実行されます。
CONSLEをクリックすると、現在の温度が摂氏で表示されます。
温度が25度以上の場合、ファンは回転を開始し、25度未満の場合は停止します。
注釈
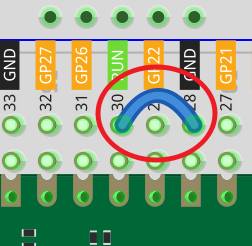
モーターが停止ボタンをクリックした後も回転し続ける場合、この時点でPico WのRunピンをGNDにワイヤーでリセットしてから、再度このワイヤーを抜いてコードを実行する必要があります。
これは、モーターが多くの電流を使用しているため、Pico Wがコンピュータから切断される可能性があるからです。
仕組み
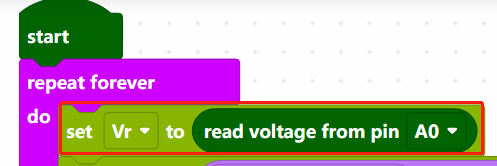
A0(GP26)の電圧が読み取られ、変数[Vr]に割り当てられます。
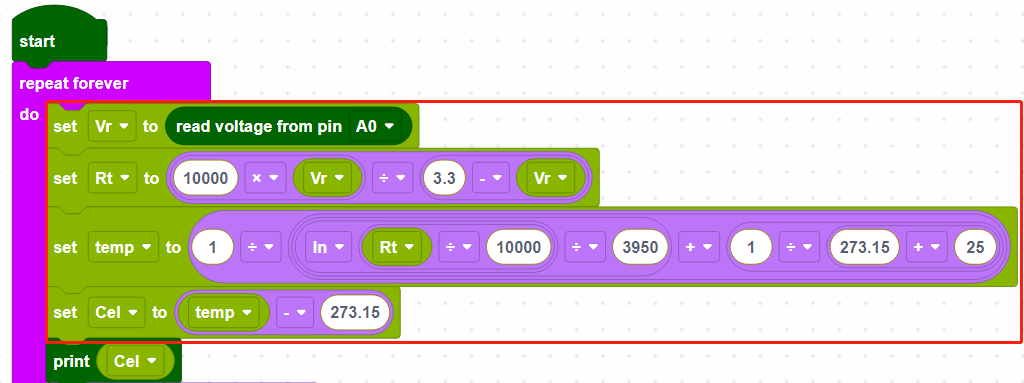
これらの計算は、サーミスターの値を摂氏度に変換します。
注釈
ここでは、抵抗と温度の関係があります:
RT =RN expB(1/TK – 1/TN)
RTは、温度がTKの場合のNTCサーミスターの抵抗です。
RNは、定格温度TNでのNTCサーミスターの抵抗です。ここでは、RNの数値は10kです。
TKはケルビン温度で、単位はKです。ここでは、TKの数値は273.15 + 摂氏度です。
TNは、定格ケルビン温度で、単位もKです。ここでは、TNの数値は273.15+25です。
B(ベータ)はNTCサーミスターの材料定数であり、また熱感度指数とも呼ばれ、数値は3950です。
expは指数の略で、底数eは自然数であり、約2.7です。
この式 TK=1/(ln(RT/RN)/B+1/TN) を変換して、ケルビン温度から273.15を引くと摂氏度になります。
この関係式は経験式です。温度と抵抗が有効範囲内である場合のみ正確です。
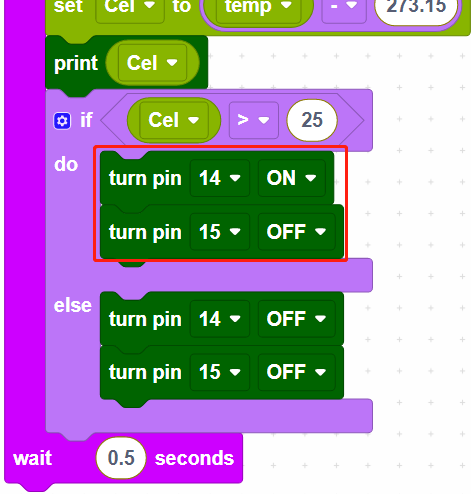
温度が25度摂氏を超える場合は、GP14をONにしてGP15をOFFに設定してモーターを回転させます。逆に、温度が25度摂氏以下の場合は、GP14とGP15の両方を低く設定してモーターを停止させます。