注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.11 逆転警報システム
このプロジェクトでは、超音波モジュールとアクティブブザーを使用して逆転警報システムを作成します。超音波モジュールは距離を検出し、ブザーは距離に応じて異なる周波数の警報音を発します。
必要なコンポーネント
このプロジェクトで必要なコンポーネントは以下の通りです。
キット全体を購入するのが便利です、リンクはこちら:
名前 |
このキットに含まれるアイテム |
リンク |
|---|---|---|
Kepler Kit |
450+ |
以下のリンクから個別にも購入できます。
SN |
コンポーネント |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
Micro USBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1(S8050) |
||
6 |
1(1KΩ) |
||
7 |
アクティブ ブザー |
1 |
|
8 |
1 |
配線
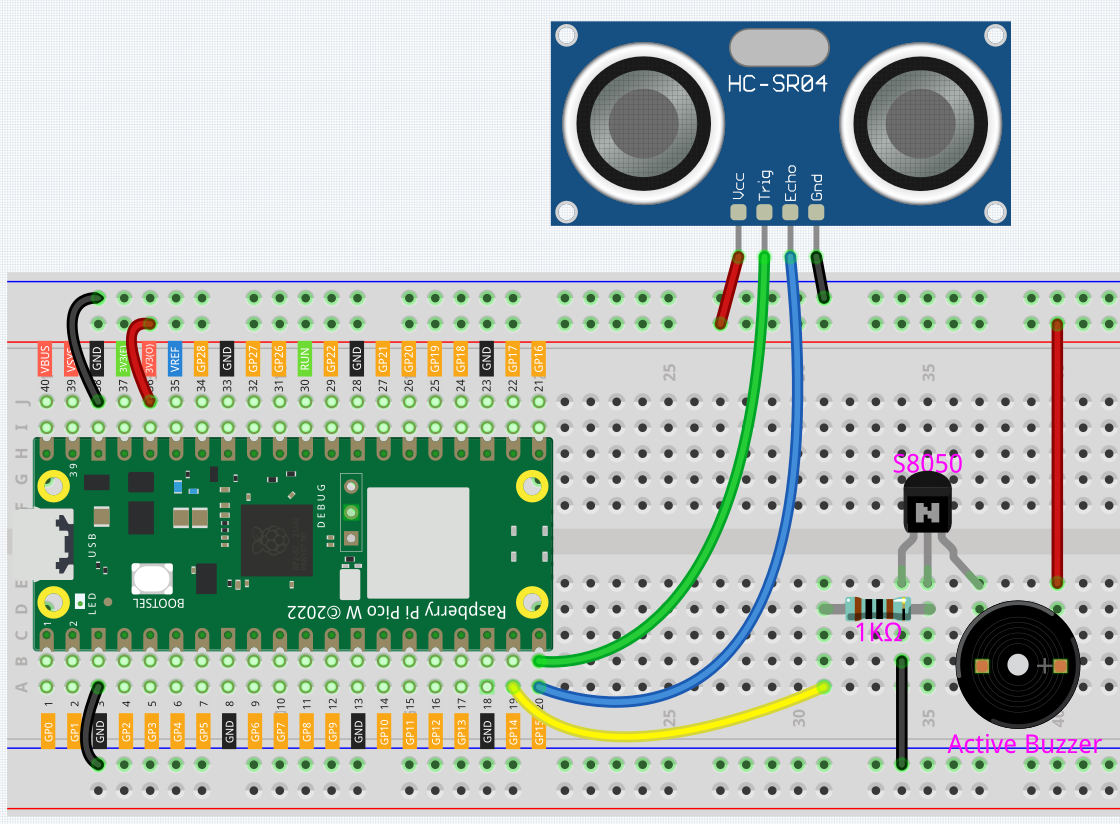
超音波モジュールのEchoとTrigピンは、同時にGP15に接続されています。これにより、超音波モジュールはGP15から信号を送受信します。
トランジスタの中央ピンは、1kΩの抵抗器を介してGP14に接続されています。
コード
注釈
下の画像を参照して、ドラッグ&ドロップでコードを書くことができます。
kepler-kit-main\piperのパスから2.11_reversing_system.pngをインポートしてください。詳細なチュートリアルは、 コードをインポート を参照してください。
Pico Wを接続した後、 スタート ボタンをクリックしてコードを実行します。
超音波検出距離が5cm未満の場合、ブザーは鋭い音(0.1秒)を発します。
検出距離が5〜10cmの場合、ブザーはやや遅い音(0.5秒)を発します。
検出距離が10cm以上の場合、1秒ごとに音声プロンプトがあります。
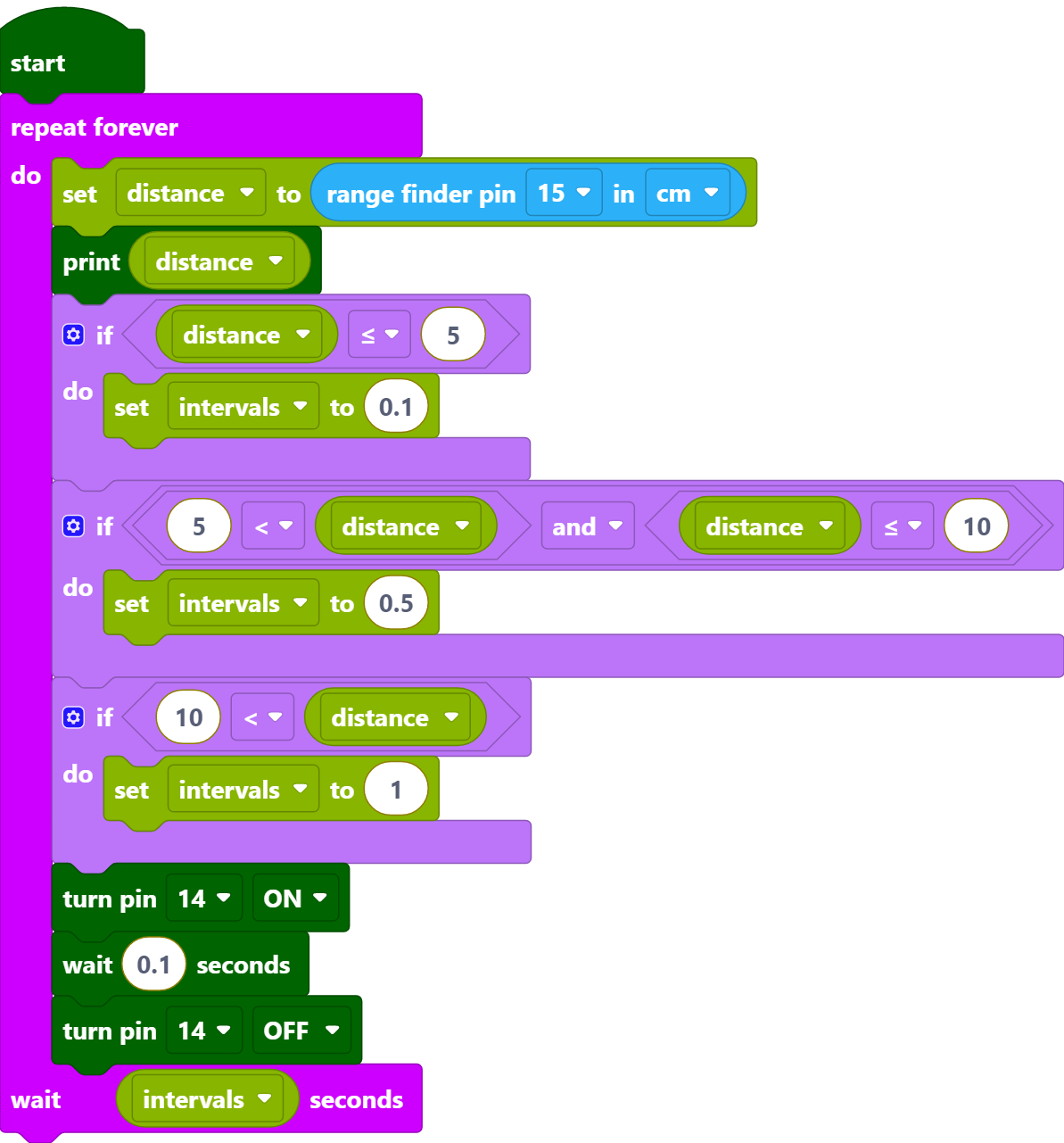
仕組み
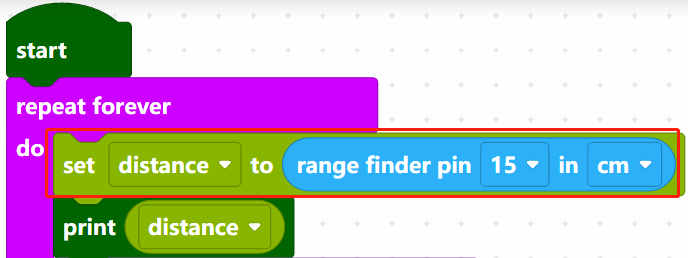
超音波検出の距離(cm)を読み取り、変数[distance]に格納します。
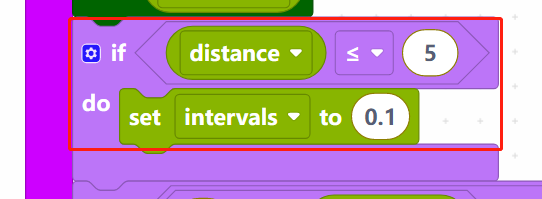
距離が5以下の場合、変数[intervals]を0.1秒に設定します。変数[intervals]はブザー音の間隔です。
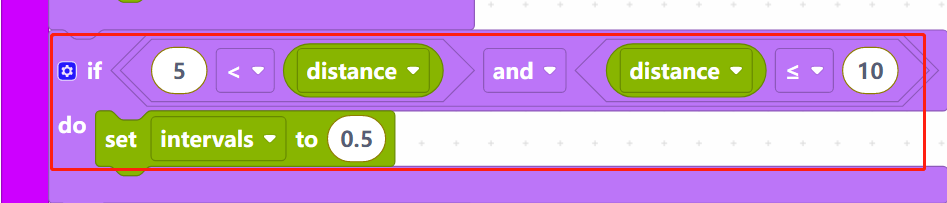
距離が5より大きく、10以下の場合、[intervals]を0.5秒に設定します。
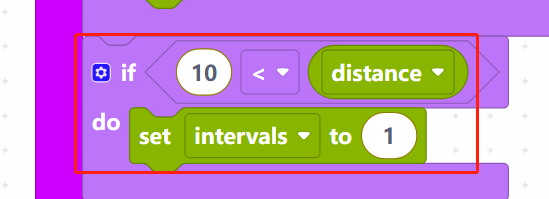
距離が10より大きい場合、[intervals]の時間を1秒に設定します。
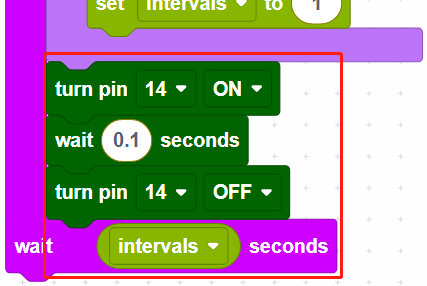
最後に、[intervals]秒ごとにブザーが鳴るようにします。