注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[ここ]をクリックして今すぐ参加しましょう!
2.7 スイングサーボ
このプロジェクトでは、サーボとポテンショメーターを使って、操舵装置を模倣します。ポテンショメーターを回転させると、サーボも連動して回転します。
必要な部品
このプロジェクトに必要な部品は以下の通りです。
全ての部品が揃ったキットを購入すると便利です。リンクは以下です:
名称 |
キットの内容 |
リンク |
|---|---|---|
ケプラーキット |
450以上 |
下記のリンクから個別に購入することもできます。
SN |
部品 |
数量 |
リンク |
|---|---|---|---|
1 |
1 |
||
2 |
マイクロUSBケーブル |
1 |
|
3 |
1 |
||
4 |
数本 |
||
5 |
1 |
||
6 |
1 |
配線方法
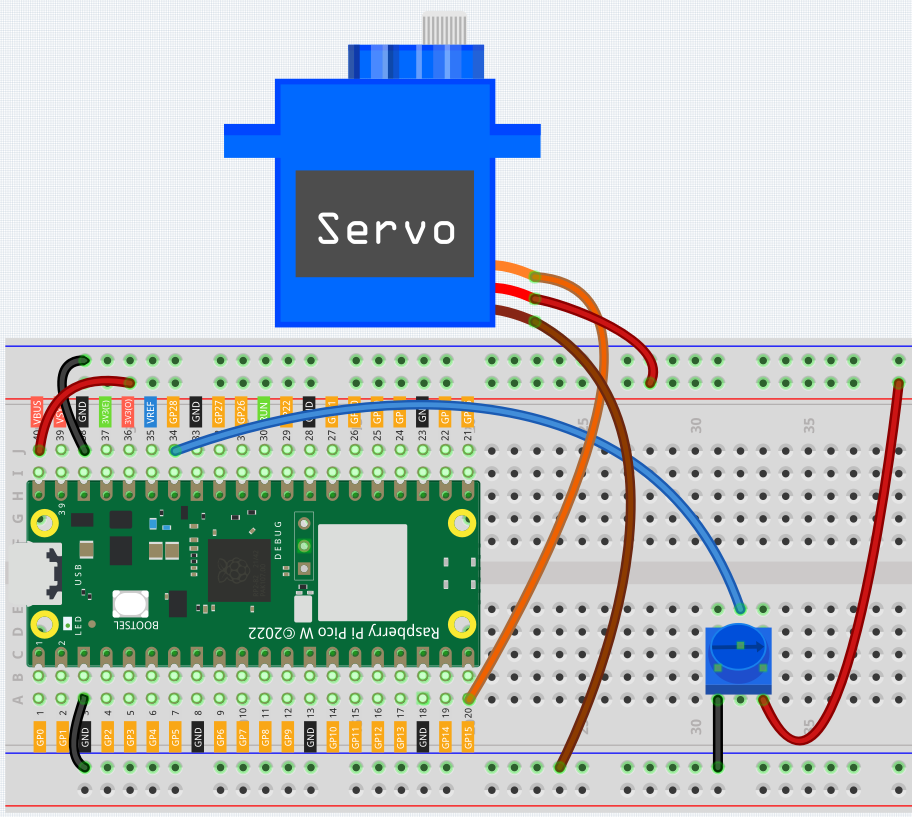
サーボのオレンジ色の線(信号)はGP15に、赤色の線(電源)はVBUSに、茶色の線(接地)はGNDに接続します。
ポテンショメーターは3端子の抵抗器で、両端のピンを5VとGNDに、中央のピンをGP26(A0)に接続します。
プログラム
注釈
下の画像を参考に、ドラッグ&ドロップでコードを作成できます。
詳しいチュートリアルは、 コードをインポート をご参照ください。
Pico Wを接続した後、 スタート ボタンを押してプログラムを実行します。
ポテンショメーターを回転させると、サーボもそれに応じて動きます。明瞭に確認するためには、サーボの軸にロッカーアームを取り付けてください。
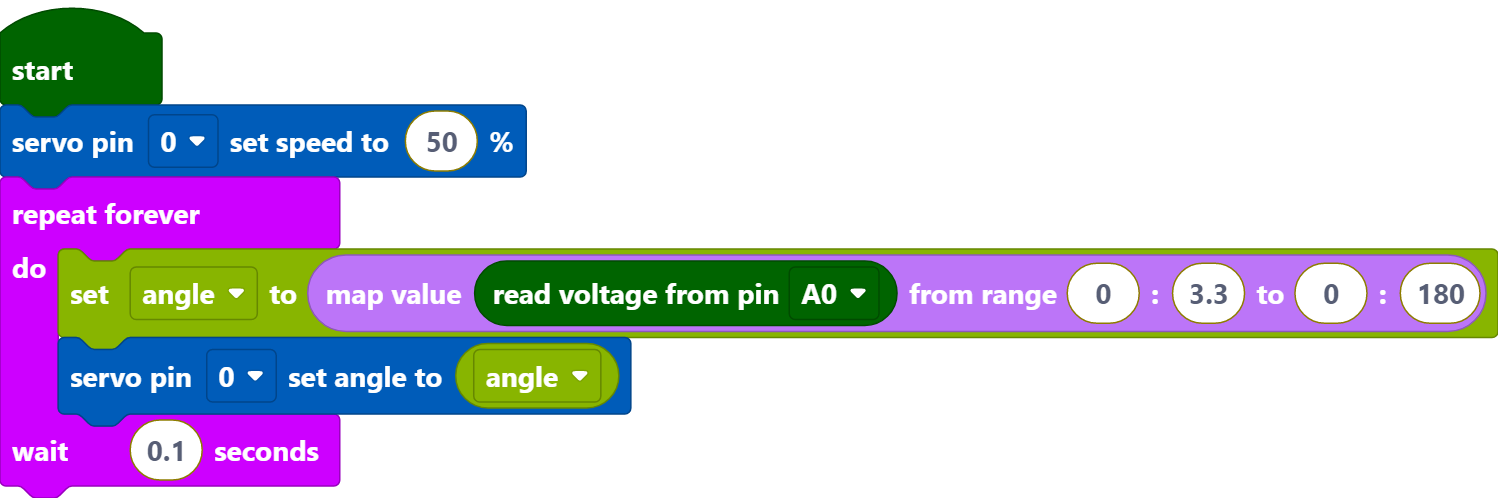
仕組み
ピン15(サーボ)の回転速度を15%に設定します。
[servo pin() set speed to ()%]: サーボのピンの回転速度を設定するために使います。範囲は0%~100%です。
変数[angle]を作成し、A0の電圧を読み取ります。[map value () from () to ()]ブロックを使って、A0の電圧を0から3.3Vまでの範囲にマッピングし、そのマッピングされた角度をサーボの回転角度として使用します。
[map value () from () to ()]: 一つの範囲から別の範囲に値をマッピングします。
注釈
A0~A2の電圧は、電源がVBUS(5V)に接続されていても、0~3.3Vの範囲です。