Note
Bonjour et bienvenue dans la communauté des passionnés de SunFounder Raspberry Pi, Arduino et ESP32 sur Facebook ! Plongez dans l’univers de Raspberry Pi, Arduino et ESP32 avec d’autres passionnés.
Pourquoi nous rejoindre ?
Support d’experts : Résolvez les problèmes après-vente et relevez vos défis techniques grâce à l’aide de notre communauté et de notre équipe.
Apprenez et Partagez : Échangez des astuces et des tutoriels pour perfectionner vos compétences.
Aperçus exclusifs : Bénéficiez d’un accès anticipé aux nouvelles annonces de produits et aux avant-premières.
Réductions spéciales : Profitez de réductions exclusives sur nos nouveaux produits.
Promotions festives et concours : Participez à des concours et à des promotions lors des fêtes.
👉 Prêt à explorer et à créer avec nous ? Cliquez sur [Ici] et rejoignez-nous dès aujourd’hui !
3.1.2 Bienvenue
Introduction
Dans ce projet, nous allons utiliser un capteur PIR pour détecter le mouvement des piétons, et utiliser des servomoteurs, une LED et un buzzer pour simuler le fonctionnement d’une porte automatique de magasin. Lorsqu’un piéton apparaît dans le champ de détection du capteur PIR, le voyant s’allume, la porte s’ouvre, et le buzzer joue un son de bienvenue.
Composants
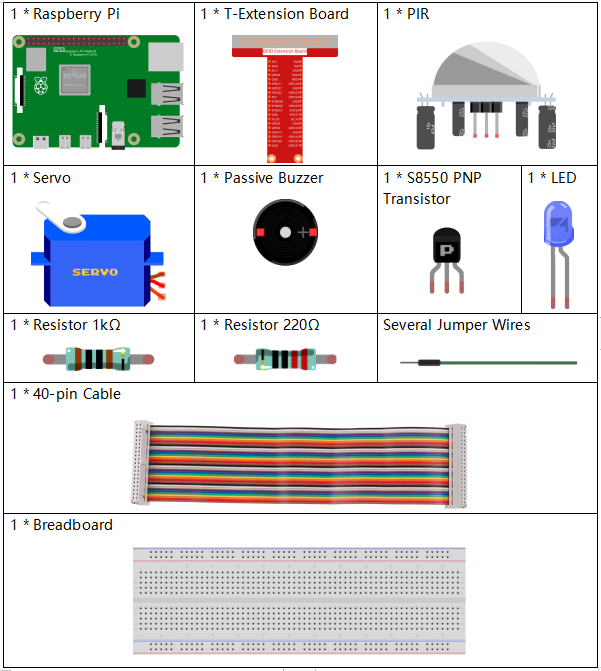
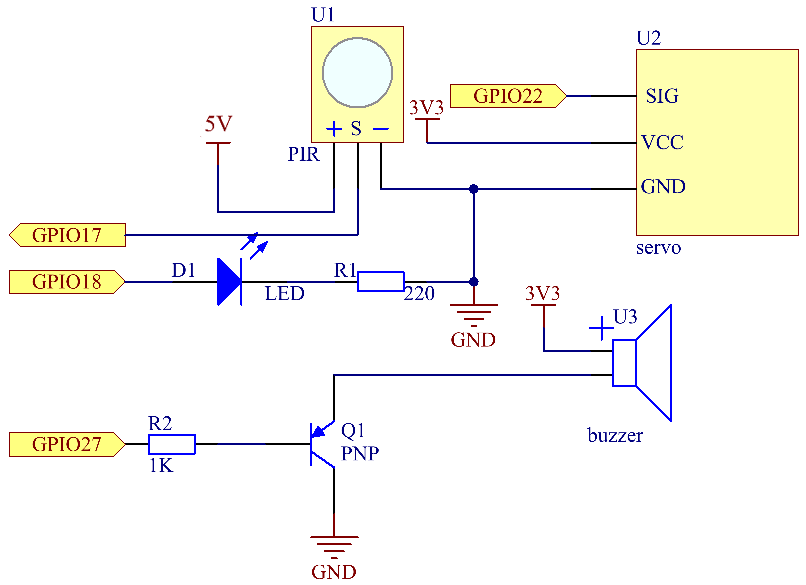
Schéma de câblage
T-Board Name |
physical |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO17 |
Pin 11 |
0 |
17 |
GPIO27 |
Pin 13 |
2 |
27 |
GPIO22 |
Pin 15 |
3 |
22 |
Procédures expérimentales
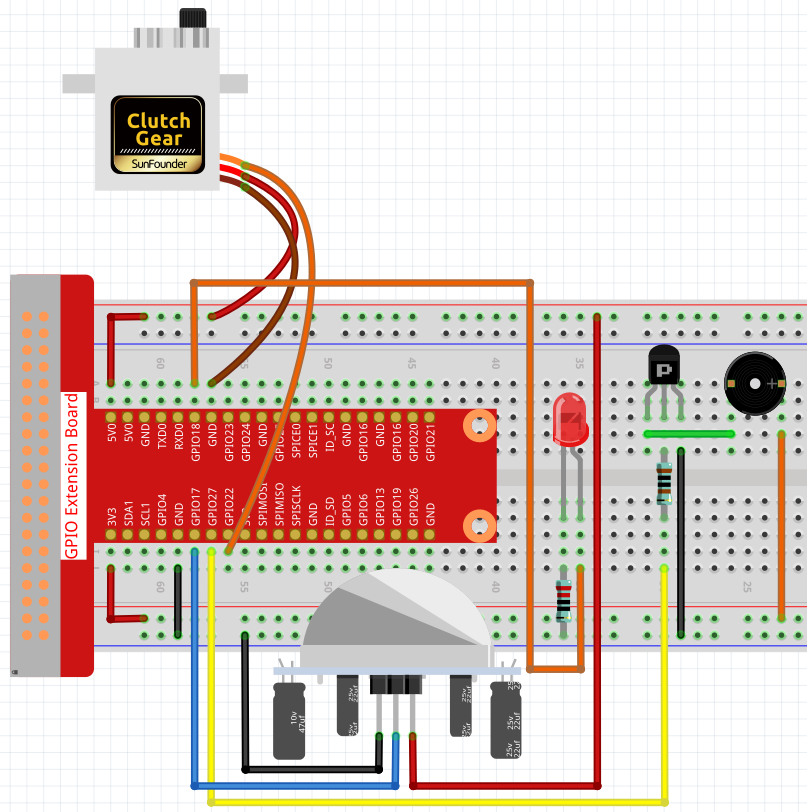
Étape 1 : Construisez le circuit.
Étape 2 : Changez de répertoire.
cd ~/davinci-kit-for-raspberry-pi/c/3.1.2/
Étape 3 : Compilez.
gcc 3.1.2_Welcome.c -lwiringPi
Étape 4 : Exécutez.
sudo ./a.out
Après l’exécution du code, si le capteur PIR détecte une personne passant à proximité, la porte s’ouvrira automatiquement (simulée par le servomoteur), le voyant s’allumera et le buzzer jouera une mélodie de bienvenue. Une fois la mélodie jouée, le système fermera automatiquement la porte et éteindra le voyant, en attente du prochain passage d’une personne.
Il y a deux potentiomètres sur le module PIR : l’un pour ajuster la sensibilité et l’autre pour régler la distance de détection. Pour un fonctionnement optimal du module PIR, tournez les deux potentiomètres complètement dans le sens antihoraire.
Note
Si cela ne fonctionne pas après l’exécution, ou s’il y a un message d’erreur indiquant : « wiringPi.h : Aucun fichier ou répertoire de ce type », veuillez vous référer à Le code C ne fonctionne pas ?.
Explication du Code
void setAngle(int pin, int angle){ // Crée une fonction pour contrôler l'angle du servomoteur.
if(angle < 0)
angle = 0;
if(angle > 180)
angle = 180;
softPwmWrite(pin,Map(angle, 0, 180, 5, 25));
}
Créez une fonction setAngle pour définir l’angle du servomoteur de 0 à 180 degrés.
void doorbell(){
for(int i=0;i<sizeof(song)/4;i++){
softToneWrite(BuzPin, song[i]);
delay(beat[i] * 250);
}
Créez une fonction doorbell pour faire jouer de la musique au buzzer.
void closedoor(){
digitalWrite(ledPin, LOW); // Éteindre la LED
for(int i=180; i>-1; i--){ // Faire tourner le servomoteur de l'angle maximum à l'angle minimum
setAngle(servoPin, i);
delay(1);
}
}
Créez la fonction closedoor pour simuler la fermeture de la porte, éteindre la LED et faire pivoter le servomoteur de 180 degrés à 0 degré.
void opendoor(){
digitalWrite(ledPin, HIGH); // Allumer la LED
for(int i=0;i<181;i++){ // Faire tourner le servomoteur de l'angle minimum à l'angle maximum
setAngle(servoPin,i);
delay(1);
}
doorbell();
closedoor();
}
La fonction opendoor() comprend plusieurs étapes : allumer le voyant, faire pivoter le servomoteur (simulant l’ouverture de la porte), jouer la mélodie de bienvenue, et appeler la fonction closedoor() après la lecture de la mélodie.
int main(void)
{
if(wiringPiSetup() == -1){ // En cas d'échec d'initialisation de wiringPi, afficher un message à l'écran
printf("setup wiringPi failed !");
return 1;
}
if(softToneCreate(BuzPin) == -1){
printf("setup softTone failed !");
return 1;
......
Dans la fonction main(), initialisez la bibliothèque wiringPi et configurez softTone, puis définissez ledPin en mode sortie et pirPin en mode entrée. Si le capteur PIR détecte une personne passant à proximité, la fonction opendoor sera appelée pour simuler l’ouverture de la porte.