Nota
¡Hola, bienvenidos a la Comunidad de Entusiastas de SunFounder para Raspberry Pi, Arduino y ESP32 en Facebook! Profundiza en Raspberry Pi, Arduino y ESP32 junto a otros entusiastas.
¿Por qué unirse?
Soporte Experto: Resuelve problemas postventa y desafíos técnicos con la ayuda de nuestra comunidad y equipo.
Aprender y Compartir: Intercambia consejos y tutoriales para mejorar tus habilidades.
Avances Exclusivos: Accede anticipadamente a anuncios de nuevos productos y adelantos exclusivos.
Descuentos Especiales: Disfruta de descuentos exclusivos en nuestros productos más recientes.
Promociones y Sorteos Festivos: Participa en sorteos y promociones de temporada.
👉 ¿Listo para explorar y crear con nosotros? Haz clic en [Aquí] y únete hoy mismo.
3.1.6 Control de Movimiento
Introducción
En esta lección, haremos un dispositivo sencillo de detección y control de movimiento. El MPU6050 se utiliza como sensor y el motor paso a paso como dispositivo controlado. Con el MPU6050 montado en un guante, puedes controlar el motor girando la muñeca.
Componentes
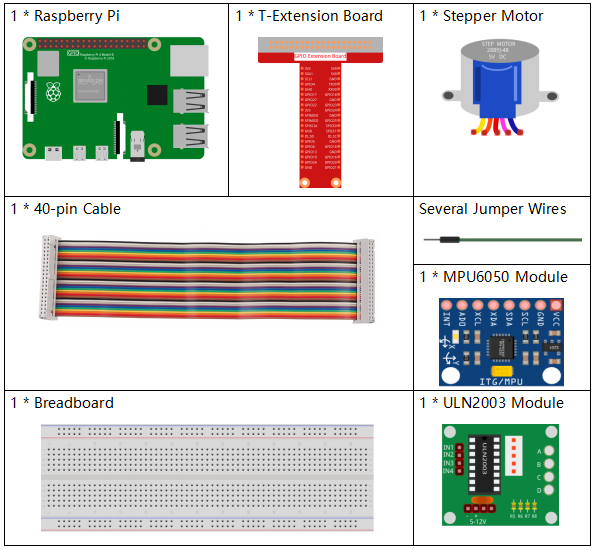
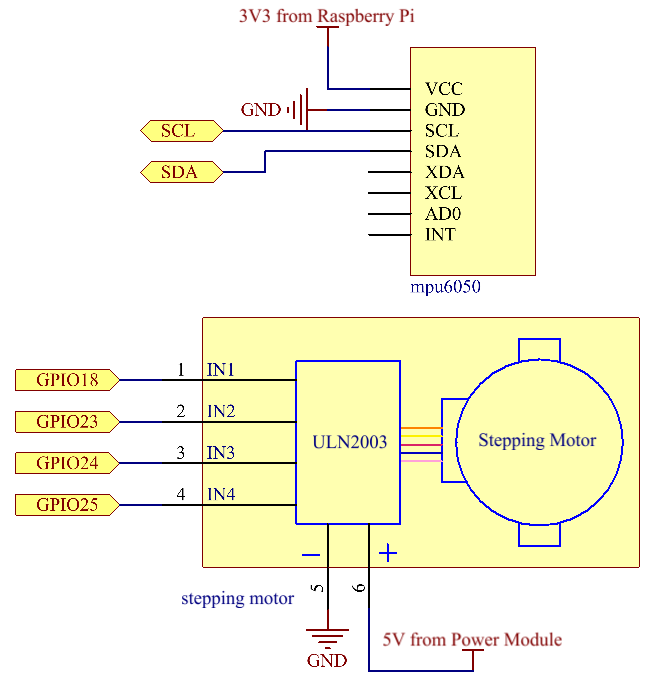
Diagrama Esquemático
T-Board Name |
physical |
wiringPi |
BCM |
GPIO18 |
Pin 12 |
1 |
18 |
GPIO23 |
Pin 16 |
4 |
23 |
GPIO24 |
Pin 18 |
5 |
24 |
GPIO25 |
Pin 22 |
6 |
25 |
SDA1 |
Pin 3 |
||
SCL1 |
Pin 5 |
Procedimientos Experimentales
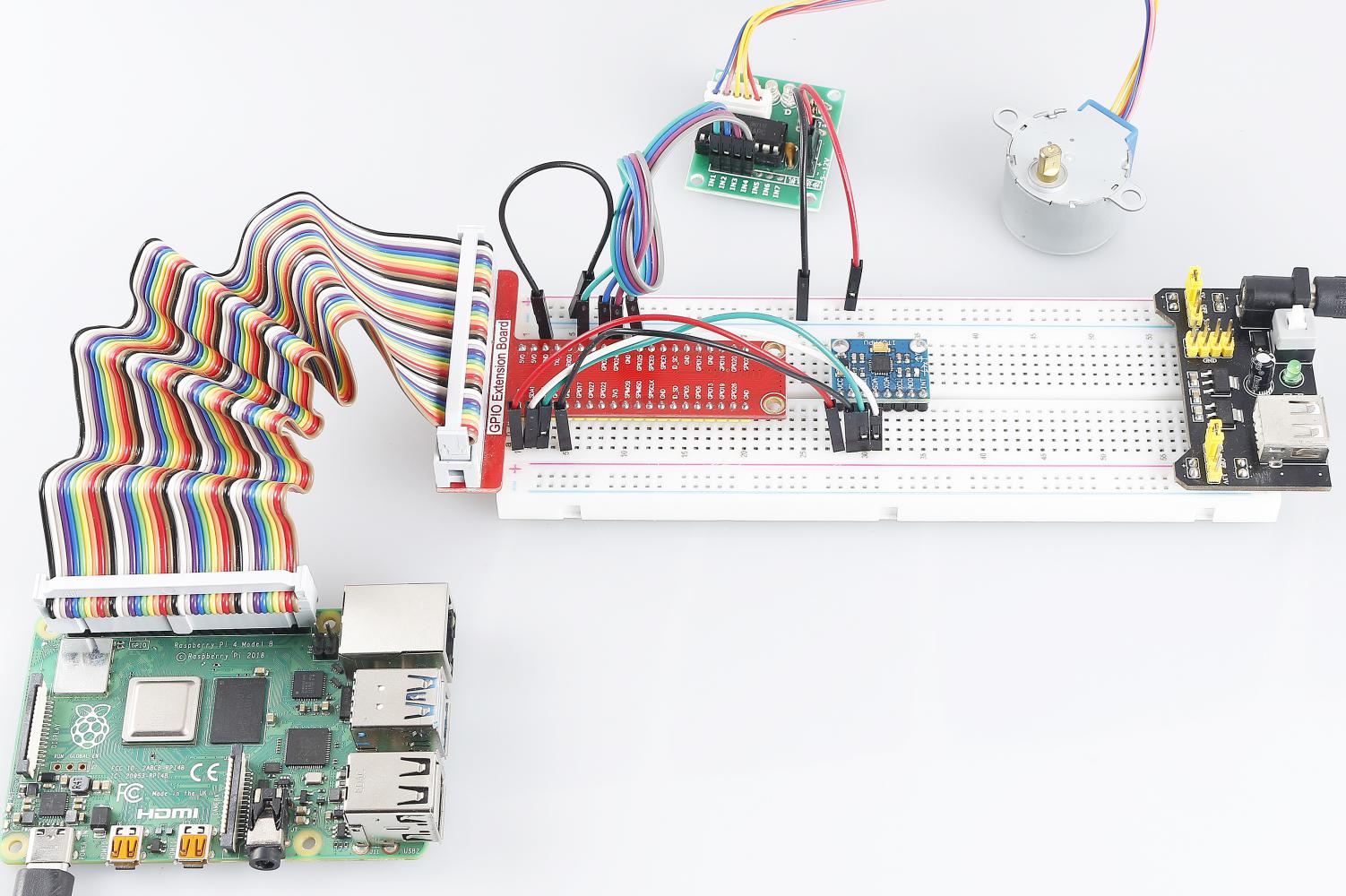
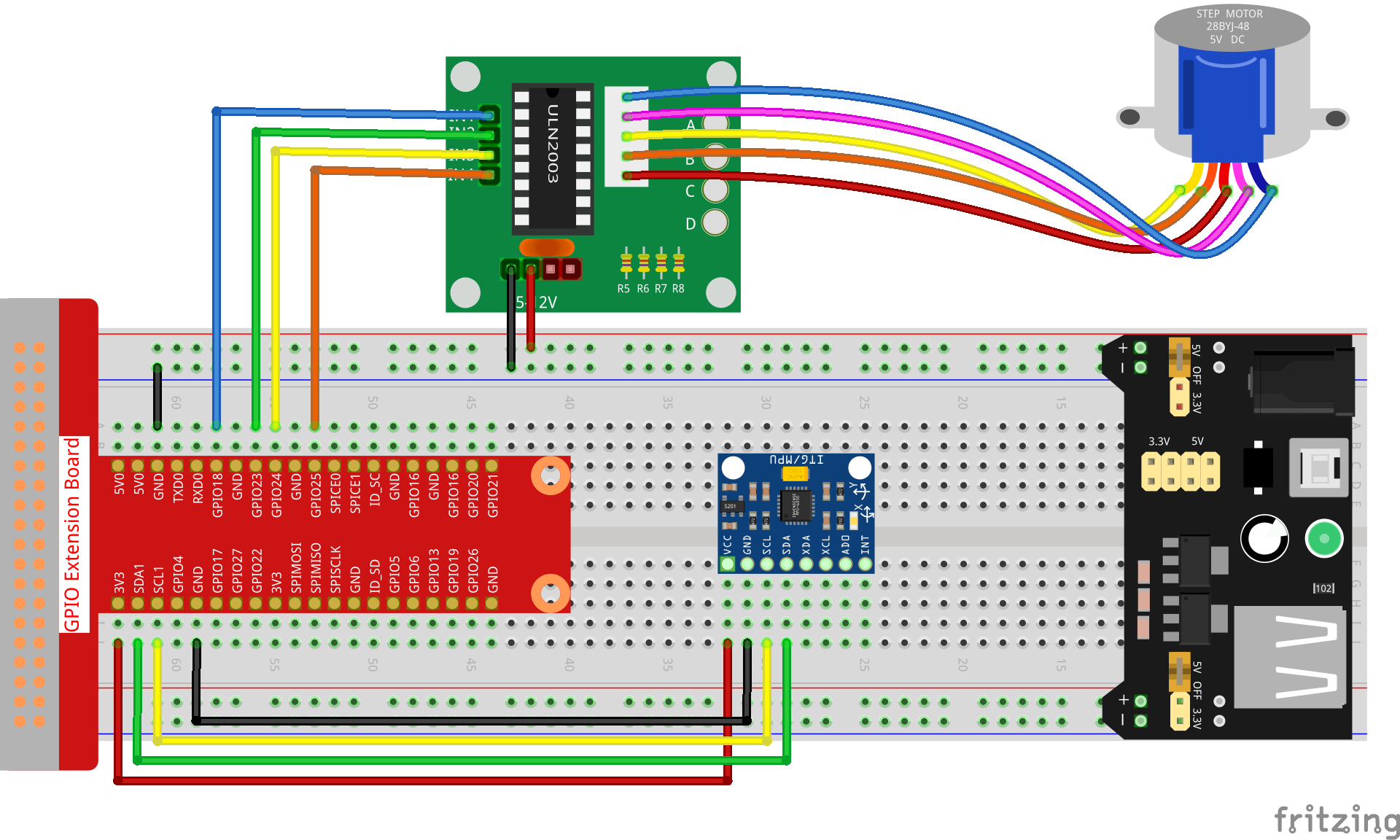
Paso 1: Arma el circuito.
Para Usuarios de Lenguaje C
Paso 2: Ve a la carpeta del código.
cd ~/davinci-kit-for-raspberry-pi/c/3.1.6/
Paso 3: Compila el código.
gcc 3.1.6_MotionControl.c -lwiringPi -lm
Paso 4: Ejecuta el archivo compilado.
sudo ./a.out
Mientras el código se ejecuta, si el ángulo de inclinación del mpu6050 en el eje Y axis es mayor a 45 °C, el motor paso a paso gira en sentido antihorario; si es menor a -45 °C, el motor gira en sentido horario.
Nota
Si no funciona después de ejecutarlo, o aparece un mensaje de error: "wiringPi.h: No such file or directory», consulta ¿El código en C no funciona?.
Explicación del Código
double mpu6050(){
acclX = read_word_2c(0x3B);
acclY = read_word_2c(0x3D);
acclZ = read_word_2c(0x3F);
acclX_scaled = acclX / 16384.0;
acclY_scaled = acclY / 16384.0;
acclZ_scaled = acclZ / 16384.0;
double angle=get_y_rotation(acclX_scaled, acclY_scaled, acclZ_scaled);
return angle;
}
mpu6050 obtiene el ángulo de inclinación en la dirección del eje Y.
void rotary(char direction){
if(direction == 'c'){
for(int j=0;j<4;j++){
for(int i=0;i<4;i++)
{digitalWrite(motorPin[i],0x99>>j & (0x08>>i));}
delayMicroseconds(stepSpeed);
}
}
else if(direction =='a'){
for(int j=0;j<4;j++){
for(int i=0;i<4;i++)
{digitalWrite(motorPin[i],0x99<<j & (0x80>>i));}
delayMicroseconds(stepSpeed);
}
}
}
Si la dirección key recibida es 'c', el motor paso a paso gira en sentido horario; si la key es 'a', el motor gira en sentido antihorario. Consulta 1.3.3 Stepper Motor para más detalles sobre el cálculo de la dirección de rotación del motor.
int main()
{
setup();
double angle;
while(1) {
angle = mpu6050();
if (angle >=45){rotary('a');}
else if (angle<=-45){rotary('c');}
}
return 0;
}
El ángulo de inclinación en la dirección del eje Y se lee desde el mpu6050, y si es mayor a 45 °C, el motor paso a paso gira en sentido antihorario; si es menor a -45 °C, el motor gira en sentido horario.
Para Usuarios de Python
Paso 2: Ve a la carpeta del código.
cd ~/davinci-kit-for-raspberry-pi/python/
Paso 3: Ejecuta el archivo.
sudo python3 3.1.6_MotionControl.py
Mientras se ejecuta el código, si el ángulo de inclinación del mpu6050 en el Y axis es mayor a 45 °C, el motor paso a paso gira en sentido antihorario; si es menor a -45 °C, el motor gira en sentido horario.
Código
Nota
Puedes Modificar/Restablecer/Copiar/Ejecutar/Detener el código a continuación. Pero antes, debes dirigirte a la ruta de código fuente como davinci-kit-for-raspberry-pi/python.
import RPi.GPIO as GPIO
import smbus
import math
import time
# Registros de gestión de energía
power_mgmt_1 = 0x6b
power_mgmt_2 = 0x6c
bus = smbus.SMBus(1)
address = 0x68
bus.write_byte_data(address, power_mgmt_1, 0)
# Pines del motor paso a paso
motorPin = (18,23,24,25)
rolePerMinute =15
stepsPerRevolution = 2048
stepSpeed = (60/rolePerMinute)/stepsPerRevolution
# mpu6050
def read_byte(adr):
return bus.read_byte_data(address, adr)
def read_word(adr):
high = bus.read_byte_data(address, adr)
low = bus.read_byte_data(address, adr+1)
val = (high << 8) + low
return val
def read_word_2c(adr):
val = read_word(adr)
if (val >= 0x8000):
return -((65535 - val) + 1)
else:
return val
def dist(a,b):
return math.sqrt((a*a)+(b*b))
def get_y_rotation(x,y,z):
radians = math.atan2(x, dist(y,z))
return -math.degrees(radians)
def get_x_rotation(x,y,z):
radians = math.atan2(y, dist(x,z))
return math.degrees(radians)
def mpu6050():
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
angle=get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
return angle
# Motor Paso a Paso
def rotary(direction):
if(direction == 'c'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99>>j & (0x08>>i))
time.sleep(stepSpeed)
elif(direction == 'a'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99<<j & (0x80>>i))
time.sleep(stepSpeed)
def setup():
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BCM)
for i in motorPin:
GPIO.setup(i, GPIO.OUT)
def loop():
while True:
angle=mpu6050()
if angle >=45 :
rotary('a')
elif angle <=-45:
rotary('c')
def destroy():
GPIO.cleanup()
if __name__ == '__main__':
setup()
try:
loop()
except KeyboardInterrupt:
destroy()
Explicación del Código
def mpu6050():
accel_xout = read_word_2c(0x3b)
accel_yout = read_word_2c(0x3d)
accel_zout = read_word_2c(0x3f)
accel_xout_scaled = accel_xout / 16384.0
accel_yout_scaled = accel_yout / 16384.0
accel_zout_scaled = accel_zout / 16384.0
angle=get_y_rotation(accel_xout_scaled, accel_yout_scaled, accel_zout_scaled)
return angle
mpu6050 obtiene el ángulo de inclinación en la dirección del eje Y.
def rotary(direction):
if(direction == 'c'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99>>j & (0x08>>i))
time.sleep(stepSpeed)
elif(direction == 'a'):
for j in range(4):
for i in range(4):
GPIO.output(motorPin[i],0x99<<j & (0x80>>i))
time.sleep(stepSpeed)
Si la dirección key recibida es 'c', el motor paso a paso gira en sentido horario; si la key es 'a', el motor gira en sentido antihorario. Consulta 1.3.3 Stepper Motor para más detalles sobre el cálculo de la dirección de rotación del motor.
def loop():
while True:
angle=mpu6050()
if angle >=45 :
rotary('a')
elif angle <=-45:
rotary('c')
El ángulo de inclinación en la dirección del eje Y se lee desde mpu6050. Si es mayor a 45 °C, se llama a rotary() para que el motor paso a paso gire en sentido antihorario; si es menor a -45 °C, el motor gira en sentido horario.
Imagen del Fenómeno