Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni l’accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi!
7. Segui la tua mano¶
Pensa a quest’auto come al tuo animale domestico, quando le farai un cenno con la mano, verrà da te.
Componenti necessari
In questo progetto, avremo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un kit completo, ecco il link:
Nome |
ELEMENTI NEL KIT |
LINK |
|---|---|---|
Kit 3 in 1 |
380+ |
Puoi anche acquistarli separatamente dai link sottostanti.
INTRODUZIONE AI COMPONENTI |
LINK D’ACQUISTO |
|---|---|
- |
|
- |
|
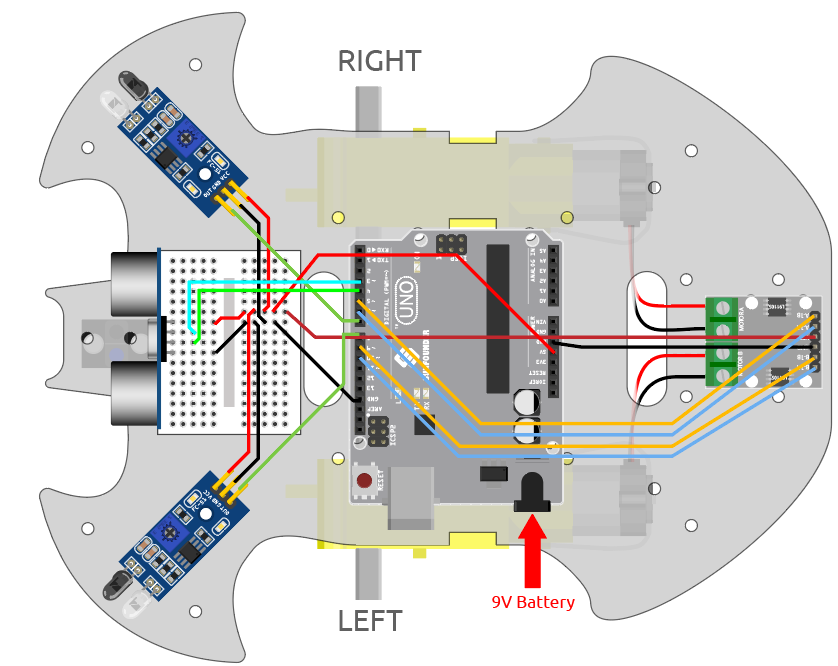
Cablaggio
Collega il modulo a ultrasuoni e i due moduli di evitamento ostacoli IR contemporaneamente.
Collega l’ultrasuono alla scheda R3 come segue.
Modulo a ultrasuoni |
Scheda R3 |
|---|---|
Vcc |
5V |
Trig |
3 |
Echo |
4 |
Gnd |
GND |
Il cablaggio dei due moduli IR di evitamento ostacoli alla scheda R3 è il seguente.
Modulo IR sinistro |
Scheda R3 |
|---|---|
OUT |
8 |
GND |
GND |
VCC |
5V |
Modulo IR destro |
Scheda R3 |
|---|---|
OUT |
7 |
GND |
GND |
VCC |
5V |
Codice
Nota
Apri il file
7.follow_your_hand.inonel percorso3in1-kit\car_project\7.follow_your_hand.Oppure copia questo codice nell’IDE Arduino.
Oppure carica il codice tramite l”Arduino Web Editor.
Posiziona l’auto a terra dopo che il codice è stato caricato correttamente. Metti la mano a 5-10 cm davanti all’auto e questa seguirà la tua mano in avanti. Se metti la mano vicino al modulo IR di evitamento ostacoli su entrambi i lati, l’auto si girerà nella direzione corrispondente.
Come funziona?
Questo progetto è una combinazione dei due precedenti 6. Gioca con il Modulo Ultrasonico e 5. Gioca con il Modulo di Evitamento degli Ostacoli, ma l’effetto implementato è diverso. Nei due progetti precedenti l’ostacolo veniva rilevato all’indietro, qui la tua mano viene rilevata per seguire la direzione in avanti o girare. Il flusso di lavoro di questo progetto è il seguente.
Leggi la distanza rilevata dal modulo a ultrasuoni e il valore di entrambi i moduli a infrarossi.
Se la distanza è di 5-10 cm, fai muovere l’auto con la tua mano.
Se il modulo IR sinistro rileva la tua mano, gira a sinistra.
Se il modulo IR destro rileva la tua mano, gira a destra.
Se né il modulo a infrarossi né quello a ultrasuoni rilevano la tua mano, ferma l’auto.
void loop() {
float distance = readSensorData();
int left = digitalRead(leftIR); // 0: Obstructed 1: Empty
int right = digitalRead(rightIR);
int speed = 150;
if (distance>5 && distance<10){
moveForward(speed);
}
if(!left&&right){
turnLeft(speed);
}else if(left&&!right){
turnRight(speed);
}else{
stopMove();
}
}