Nota
Ciao, benvenuto nella SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community su Facebook! Approfondisci le tue conoscenze su Raspberry Pi, Arduino ed ESP32 insieme ad altri appassionati.
Perché unirti?
Supporto esperto: Risolvi i problemi post-vendita e le sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia consigli e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni l’accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti speciali: Approfitta di sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e omaggi: Partecipa a omaggi e promozioni festive.
👉 Sei pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi!
Assemblaggio dell’Auto¶
Video
Passaggi
Segui i passaggi riportati di seguito per completare l’assemblaggio dell’auto.
Rimuovi la pellicola protettiva dall’acrilico.

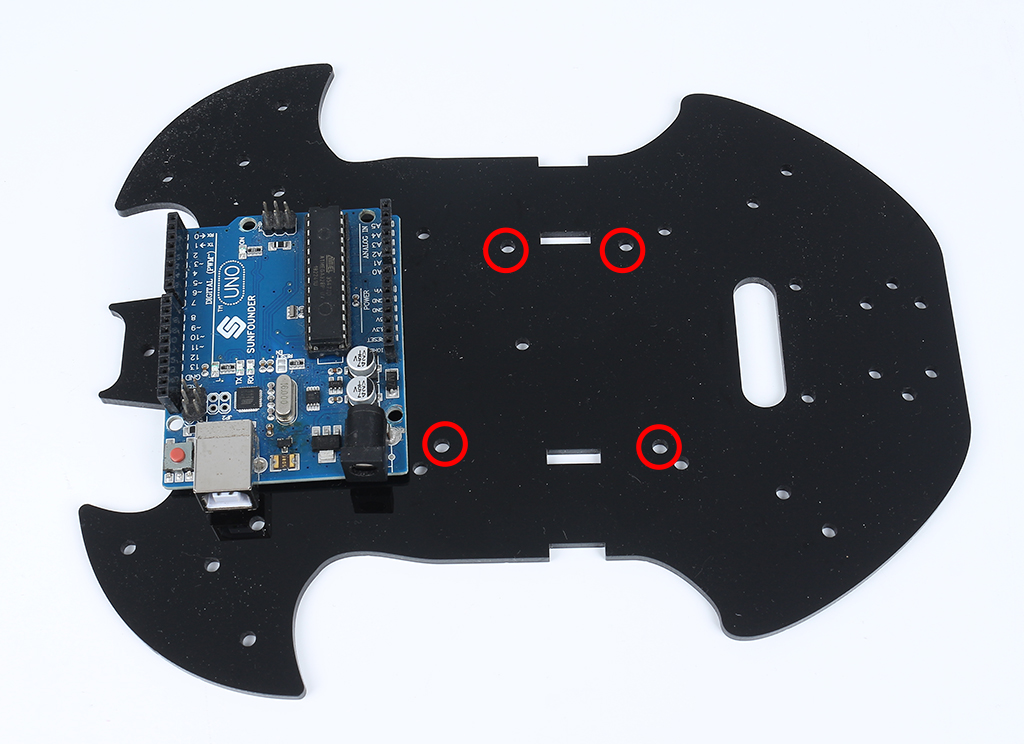
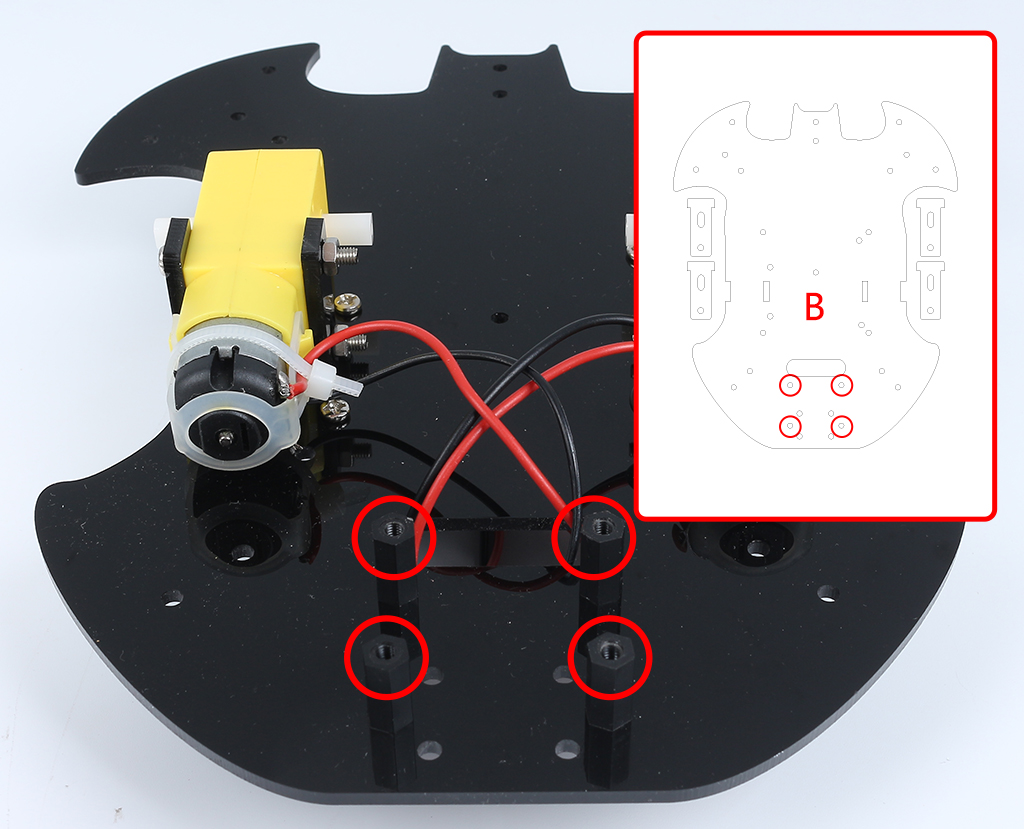
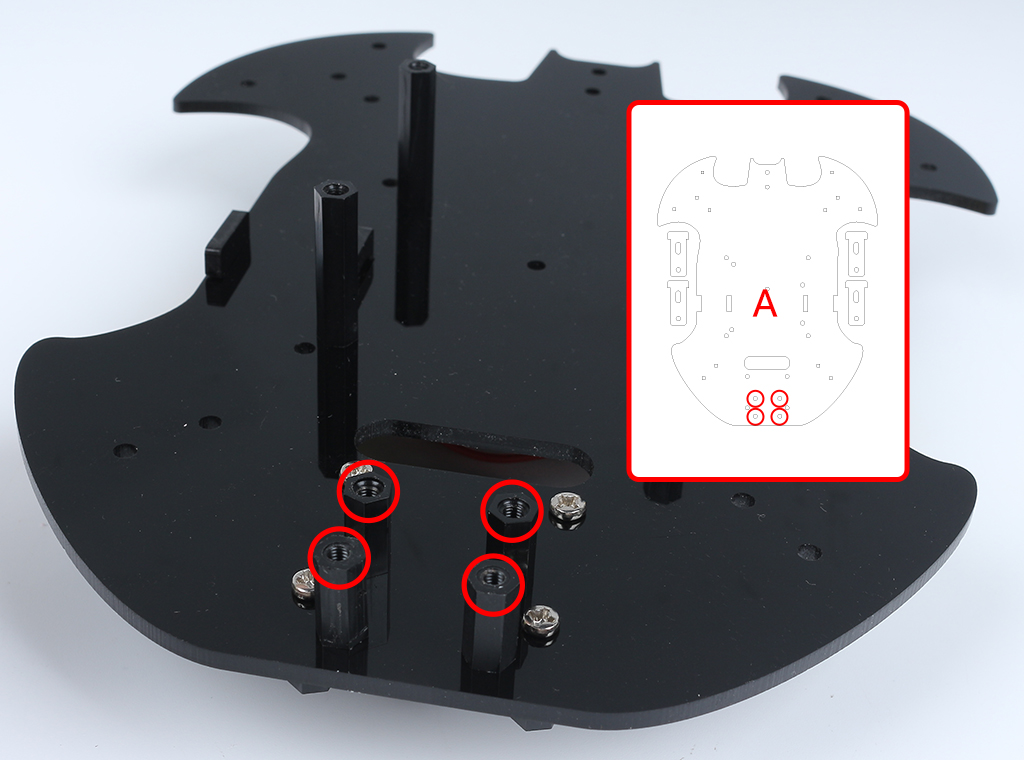
Posiziona la scheda sul tavolo come mostrato nell’immagine, il lato con lo stesso foro della scheda R3 lo chiameremo A; il retro è B. Questo ti aiuterà a evitare errori durante l’assemblaggio.
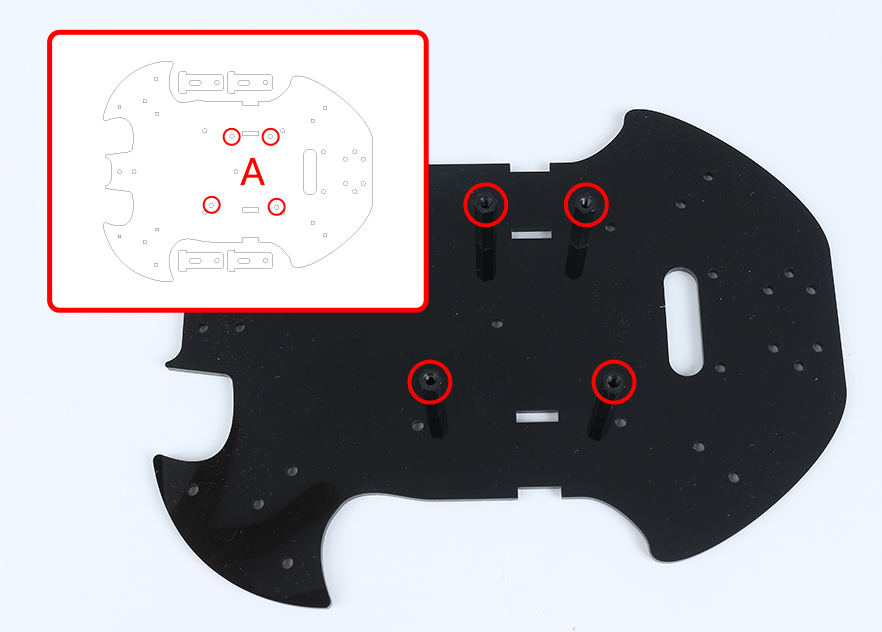
Monta il distanziatore M3x24mm con le viti M3x6mm nella posizione mostrata di seguito.
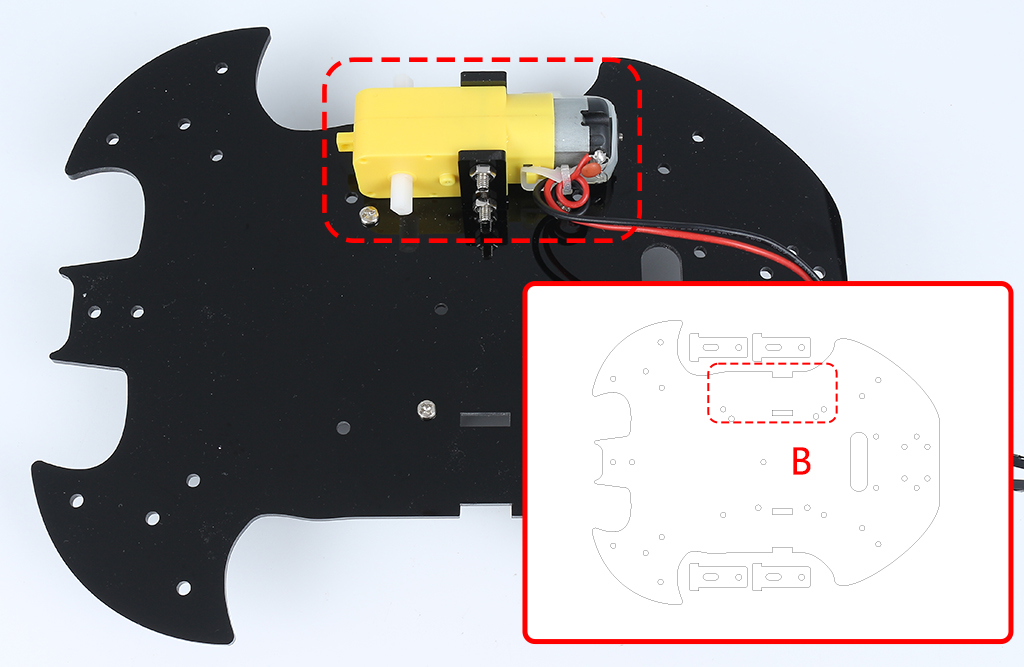
Gira il lato B, usa le viti M3x30mm e i dadi M3 per fissare il motore TT. Due dettagli importanti: 1 - l’albero di uscita è rivolto verso il lato a forma di pipistrello; 2 - il cavo del motore è rivolto verso l’interno.
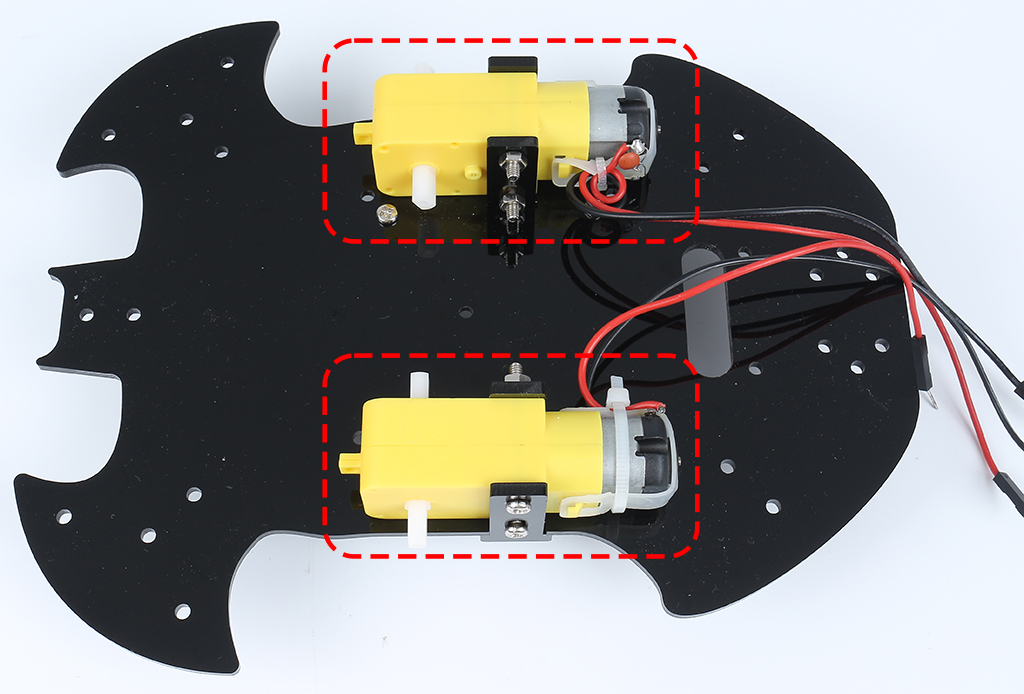
Monta l’altro motore TT, prestando attenzione alla direzione dell’albero di uscita e del cavo.
Usa le viti M3x6mm per montare il distanziatore M3x10mm nella posizione indicata di seguito.
Fissa il distanziatore M2.5x11mm al retro dell’auto con le viti M2.5x6mm.
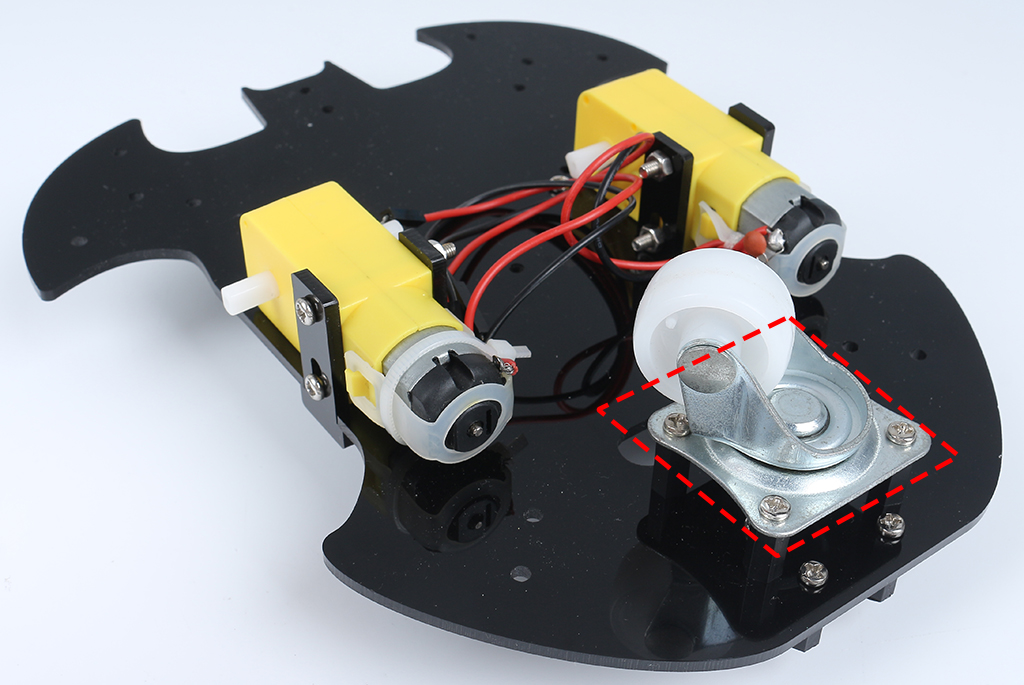
Usa le viti M3x6mm per montare la ruota universale.
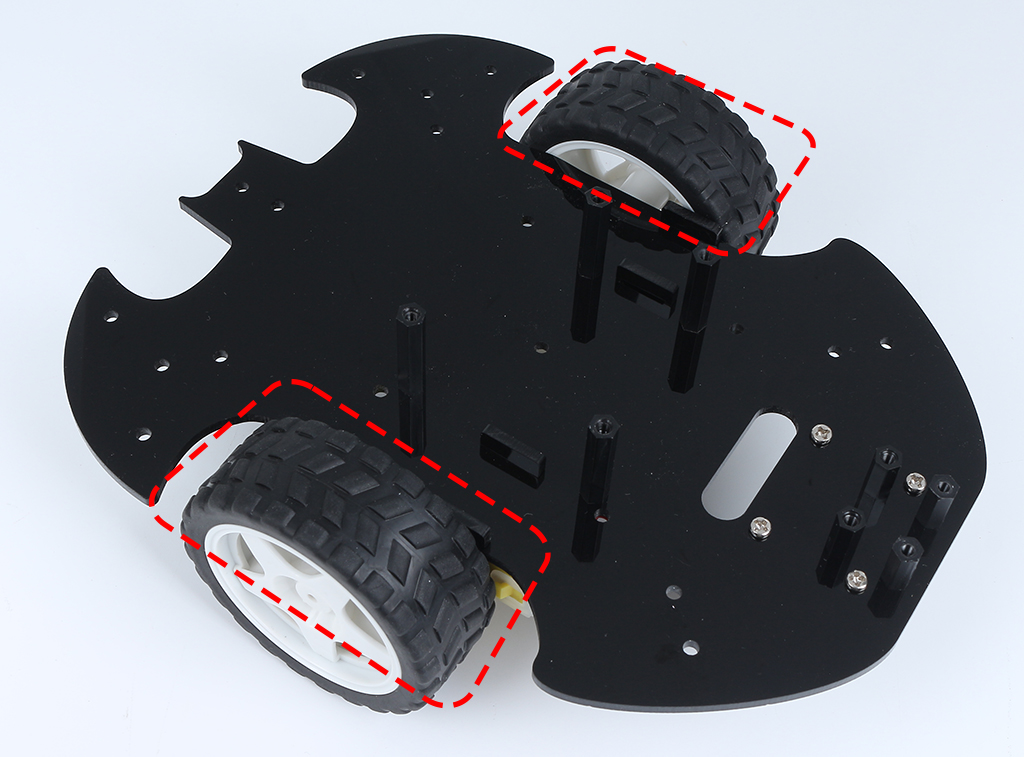
Monta le 2 ruote e la struttura di base dell’auto sarà completata.
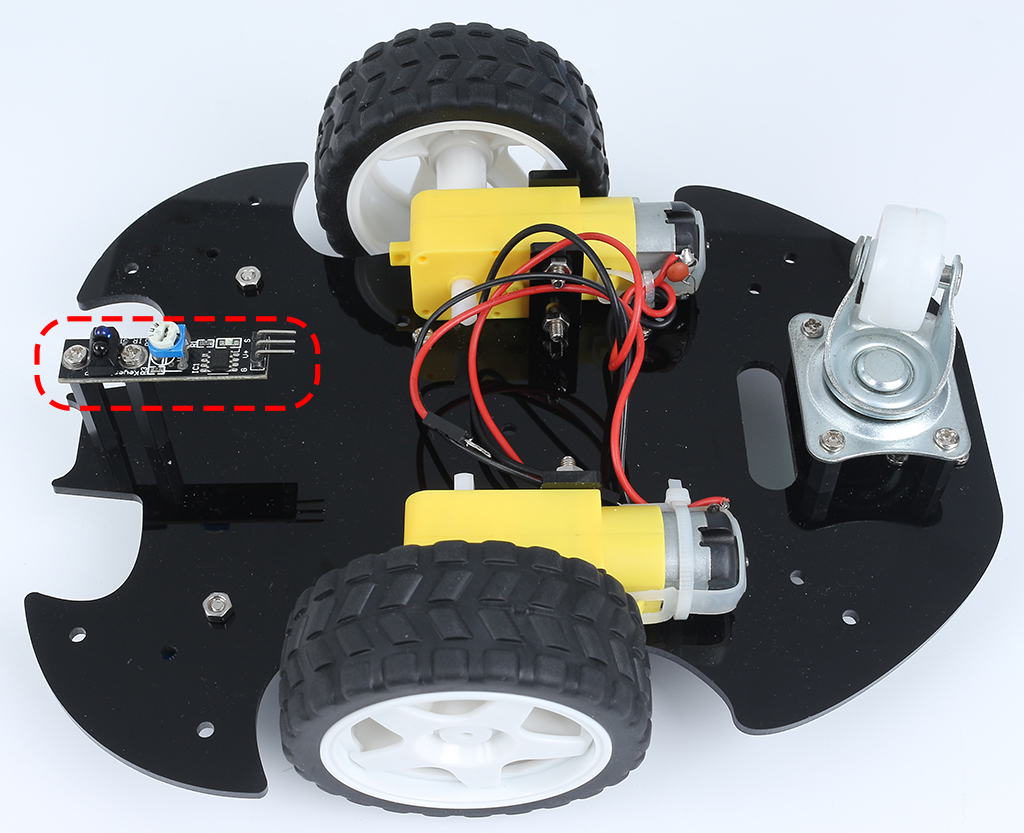
Fissa il modulo L9110 con le viti M2.5x6mm.

Monta i due moduli IR Obstacle con le viti M3x10mm e i dadi M3.
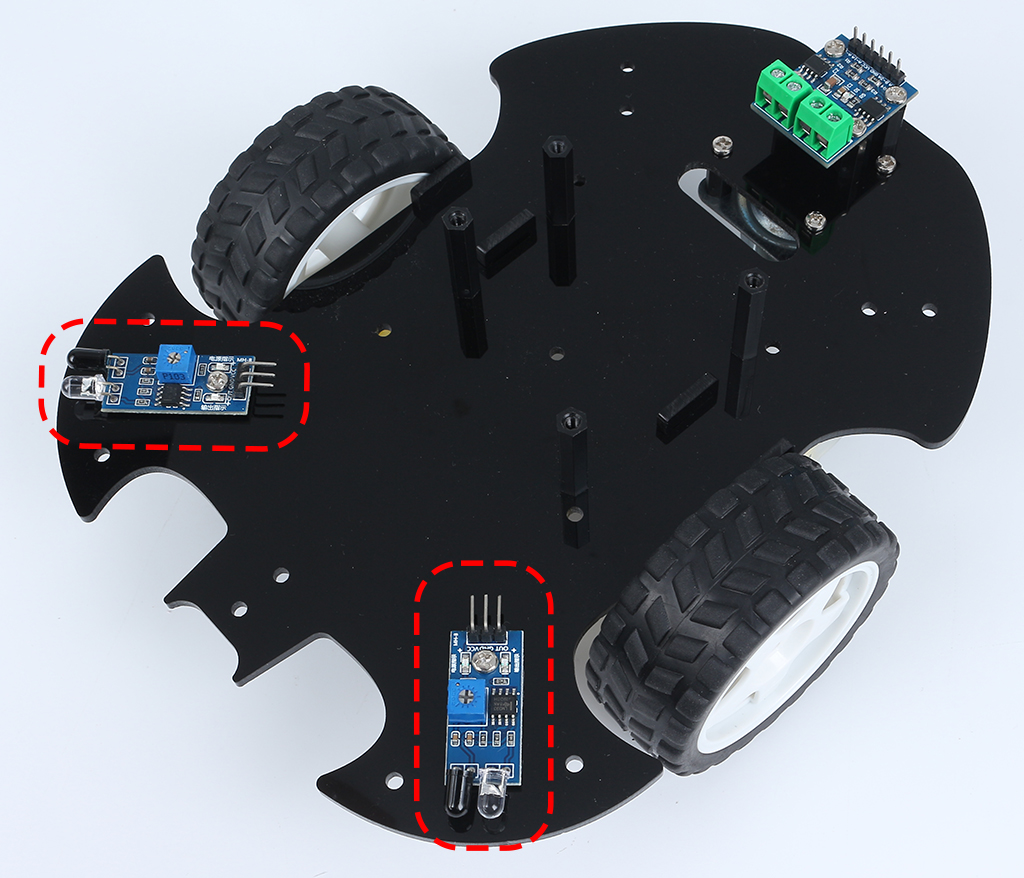
Gira il lato B e monta il modulo Line Track con quattro viti M3x6mm e due distanziatori M3x24mm.
Nota
È consigliabile fissare prima i distanziatori M3x24mm al modulo Line Track.
Una nota importante: i pin del sensore di linea sono leggermente flessibili e sporgono verso i fori. Quando avviti i distanziatori M3x24mm, applica una leggera pressione per spostare leggermente i pin del sensore.
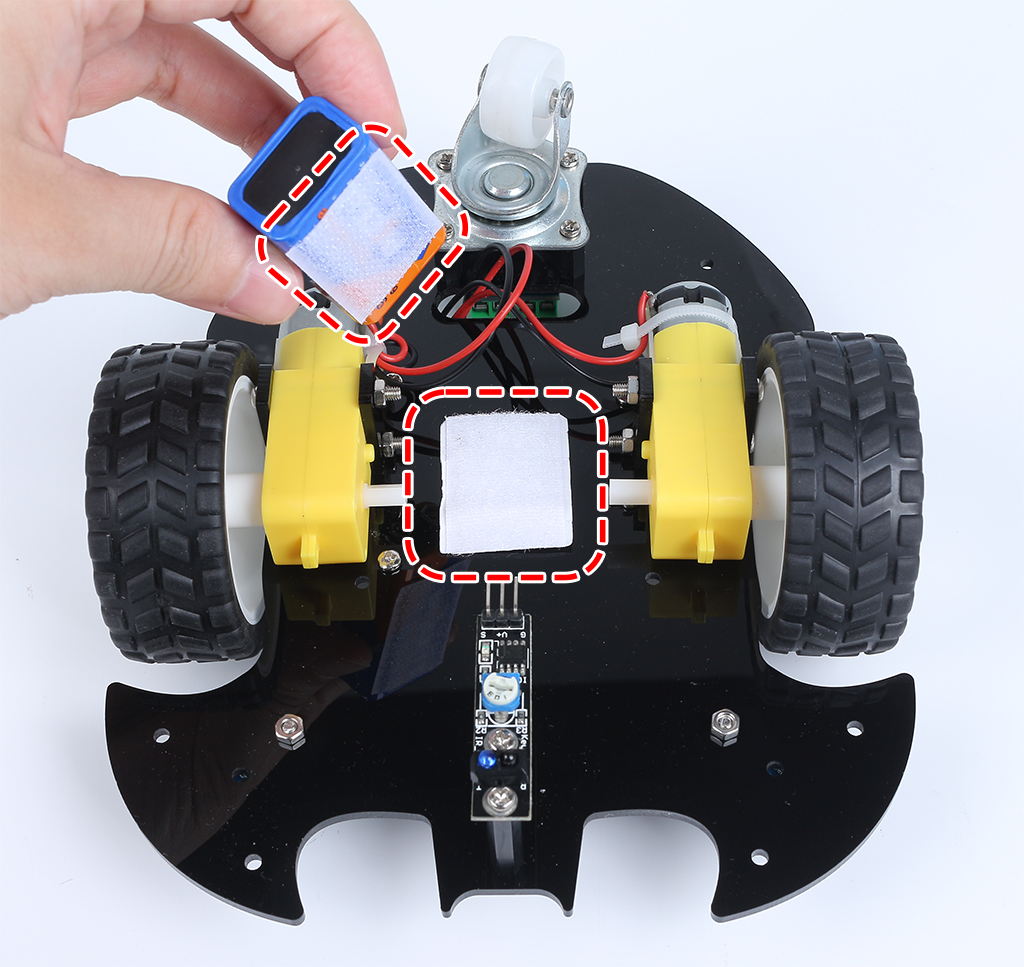
Attacca il velcro sulla batteria da 9V e fissa la clip della batteria. Attacca l’altra sezione del velcro sull’auto per fissare la batteria.
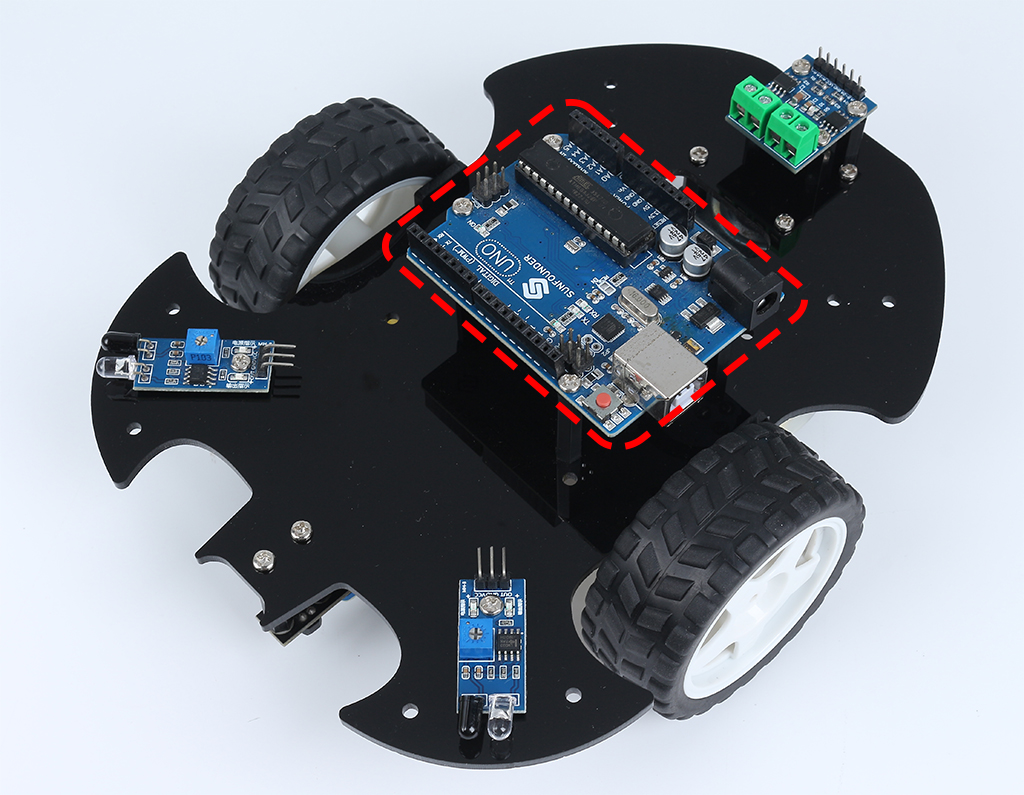
Gira sul lato A e monta la scheda R3 con le viti M3x6mm.
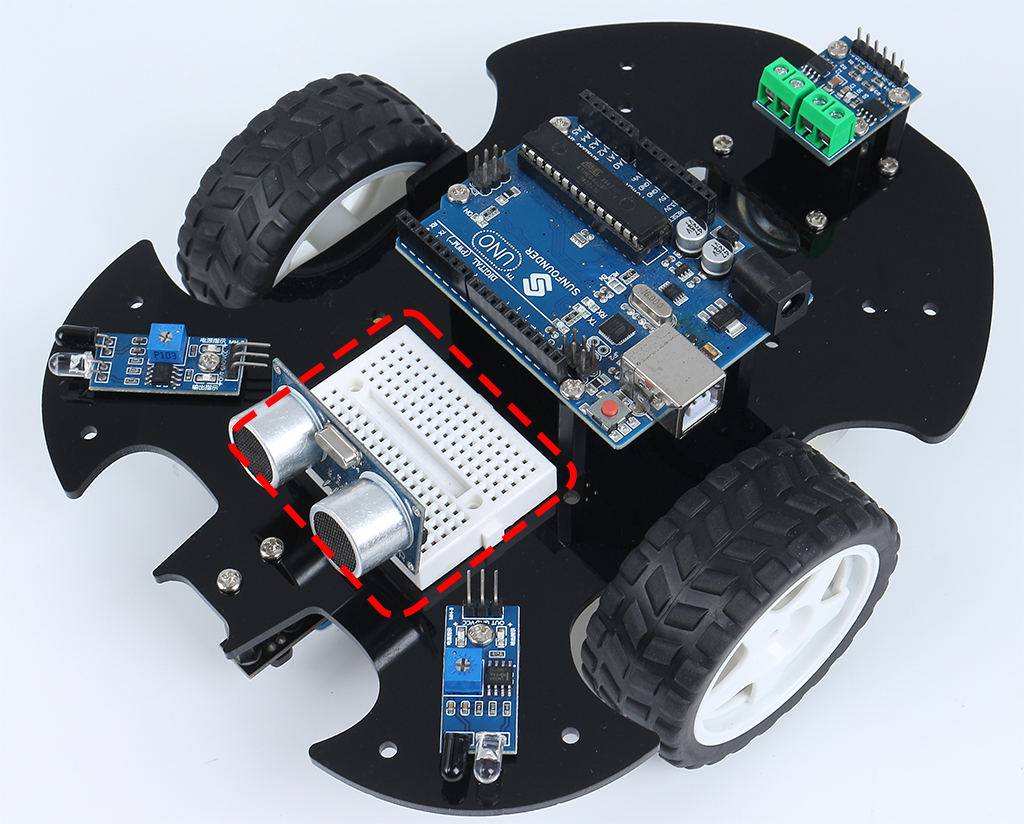
Fissa la breadboard alla parte anteriore dell’auto. Successivamente, potrai aggiungere diversi componenti (ad esempio, il modulo ultrasonico) sulla breadboard come richiesto per il tuo progetto.
Far funzionare l’auto richiede anche il cablaggio e la scrittura del codice, che verranno trattati nelle sezioni successive.