Nota
Ciao, benvenuto nella community SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts su Facebook! Approfondisci Raspberry Pi, Arduino ed ESP32 con altri appassionati.
Perché unirsi?
Supporto esperto: Risolvi problemi post-vendita e sfide tecniche con l’aiuto della nostra community e del nostro team.
Impara e condividi: Scambia suggerimenti e tutorial per migliorare le tue competenze.
Anteprime esclusive: Ottieni l’accesso anticipato agli annunci di nuovi prodotti e anteprime.
Sconti speciali: Goditi sconti esclusivi sui nostri prodotti più recenti.
Promozioni festive e concorsi: Partecipa a concorsi e promozioni speciali durante le festività.
👉 Pronto a esplorare e creare con noi? Clicca su [Qui] e unisciti oggi stesso!
2. Movimento tramite codice¶
Nel progetto precedente, abbiamo controllato il funzionamento del motore utilizzando diversi segnali di livello per l’input del modulo L9110.
Se modifichiamo i segnali di livello attraverso il programma, possiamo controllare il movimento dell’auto in modo più flessibile.
Componenti necessari
Per questo progetto, abbiamo bisogno dei seguenti componenti.
È sicuramente conveniente acquistare un intero kit, ecco il link:
Nome |
ELEMENTI IN QUESTO KIT |
LINK |
|---|---|---|
Kit Starter 3 in 1 |
380+ |
Puoi anche acquistarli separatamente dai link qui sotto.
INTRODUZIONE AI COMPONENTI |
LINK PER L’ACQUISTO |
|---|---|
- |
|
- |
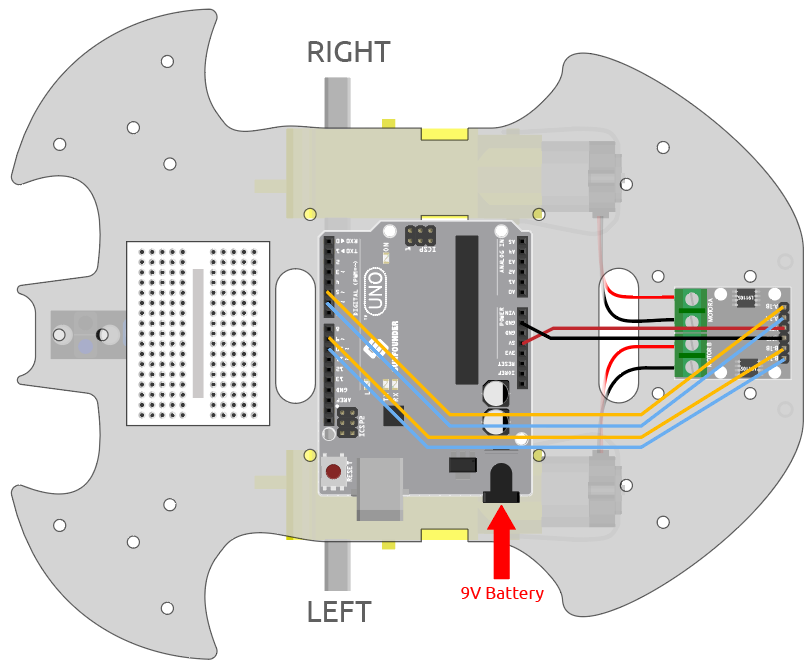
Collegamenti
Collega i fili tra il modulo L9110 e la scheda R3 seguendo lo schema qui sotto.
Modulo L9110 |
Scheda R3 |
Motore |
|---|---|---|
A-1B |
5 |
|
A-1A |
6 |
|
B-1B(B-2A) |
9 |
|
B-1A |
10 |
|
OB(B) |
Filo nero del motore destro |
|
OA(B) |
Filo rosso del motore destro |
|
OB(A) |
Filo nero del motore sinistro |
|
OA(A) |
Filo rosso del motore sinistro |
Codice
Nota
Apri il file
2.move.inonel percorso3in1-kit\car_project\2.move.Oppure copia questo codice nell”IDE di Arduino.
Dopo il caricamento del codice, l’auto si muoverà avanti, indietro, a sinistra e a destra per due secondi rispettivamente.
Come funziona?
Questo progetto è essenzialmente lo stesso del precedente, e consiste nel far muovere l’auto in avanti, indietro, a sinistra e a destra, nonché fermarsi, fornendo diversi segnali di livello ai pin di input del modulo L9110.
Inizializza i pin del modulo L9110.
const int A_1B = 5; const int A_1A = 6; const int B_1B = 9; const int B_1A = 10; void setup() { pinMode(A_1B, OUTPUT); pinMode(A_1A, OUTPUT); pinMode(B_1B, OUTPUT); pinMode(B_1A, OUTPUT); }
Imposta i pin di input su diversi livelli alti o bassi per controllare la rotazione dei motori sinistro e destro, quindi incapsulali in singole funzioni.
void moveForward() { digitalWrite(A_1B, LOW); digitalWrite(A_1A, HIGH); digitalWrite(B_1B, HIGH); digitalWrite(B_1A, LOW); } void moveBackward() { digitalWrite(A_1B, HIGH); digitalWrite(A_1A, LOW); digitalWrite(B_1B, LOW); digitalWrite(B_1A, HIGH); } ...
Chiama queste funzioni in
loop().void loop() { moveForward(); delay(2000); stopMove(); delay(500); moveBackward(); delay(2000); stopMove(); delay(500); ...
-
pin: il numero del pin di Arduino.value: HIGH o LOW.
Scrive un valore HIGH o LOW su un pin digitale. Se il pin è stato configurato come
OUTPUTconpinMode(), la sua tensione verrà impostata sul valore corrispondente: 5V (o 3.3V su schede a 3.3V) per HIGH, 0V (massa) per LOW. -
pin: il numero del pin di Arduino da impostare.mode: INPUT, OUTPUT o INPUT_PULLUP.
Configura il pin specificato per comportarsi come input o output.
-
ms: il numero di millisecondi di pausa. Tipi di dati consentiti: unsigned long.
Mette in pausa il programma per il tempo specificato (in millisecondi) come parametro. (Ci sono 1000 millisecondi in un secondo.)