Note
Hello, welcome to the SunFounder Raspberry Pi & Arduino & ESP32 Enthusiasts Community on Facebook! Dive deeper into Raspberry Pi, Arduino, and ESP32 with fellow enthusiasts.
Why Join?
Expert Support: Solve post-sale issues and technical challenges with help from our community and team.
Learn & Share: Exchange tips and tutorials to enhance your skills.
Exclusive Previews: Get early access to new product announcements and sneak peeks.
Special Discounts: Enjoy exclusive discounts on our newest products.
Festive Promotions and Giveaways: Take part in giveaways and holiday promotions.
👉 Ready to explore and create with us? Click [here] and join today!
1. Basic Movements
You will learn how to make the Zeus Car move in all directions in this project.
How to do?
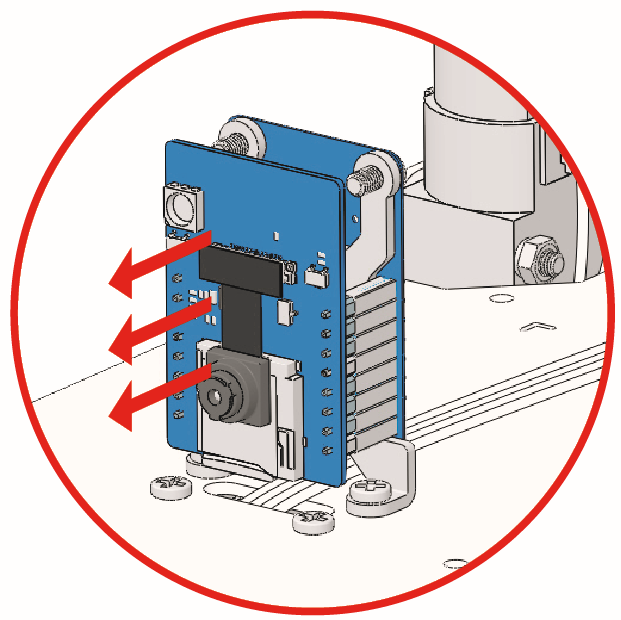
The ESP32-CAM and the Arduino board share the same RX (receive) and TX (transmit) pins. So, when you’re uploading code, you’ll need to first disconnect the ESP32-CAM to avoid any conflicts or potential issues.
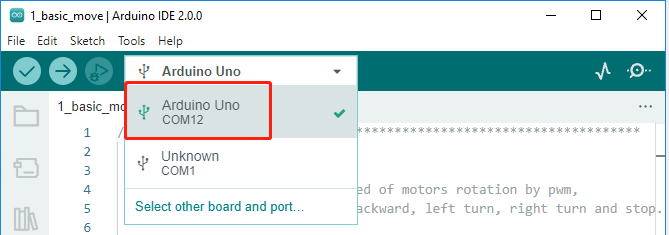
Connect the Zeus Car to your computer with the blue USB cable. When you plug in your Arduino board, the computer automatically recognizes it and assigns it a COM port, which you can view in Device Manager.
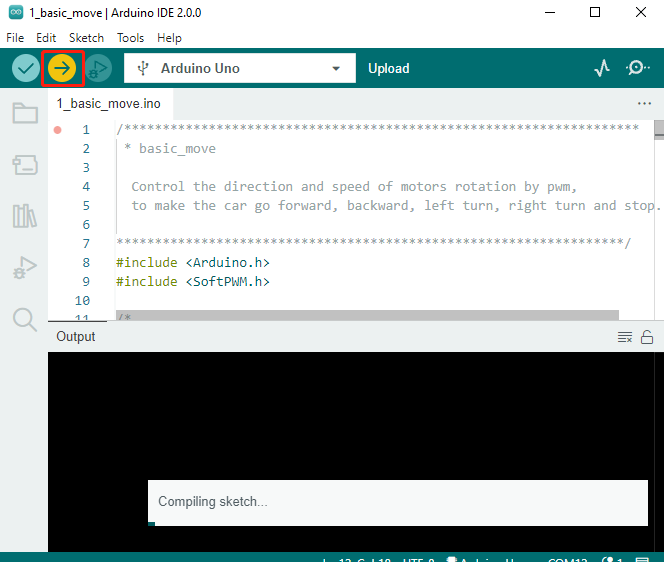
Open the
1_basic_move.inofile under the path ofzeus-car-main\examples\1_basic_move.You can quickly select the board and port from this place.
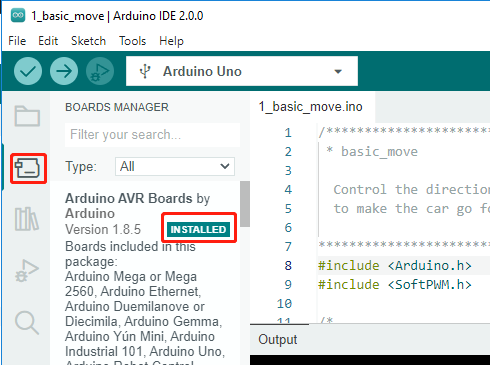
Note
In case COMxx doesn’t appear, open the Board Manager from the left and make sure the “Arduino AVR Boards” core is installed.
Now click the Upload button to upload the code to the Arduino board. When it is finished, a notification pops up in the bottom right of your IDE window. Of course, sometimes there are some complications when uploading, and these errors will be listed here as well.
Note
If you get a “Compilation error: SoftPWM.h: No such file or directory” prompt, it means you don’t have the
SoftPWMlibrary installed.Please refer to Install the Required Libraries to install the two required libraries
SoftPWMandIRLremote.
Let’s start the Zeus Car.
When first used or when the battery cable is unplugged, Zeus Car Shield will activate its over-discharge protection circuitry.
So you’ll need to plug in the Type-C cable for about 5 seconds.
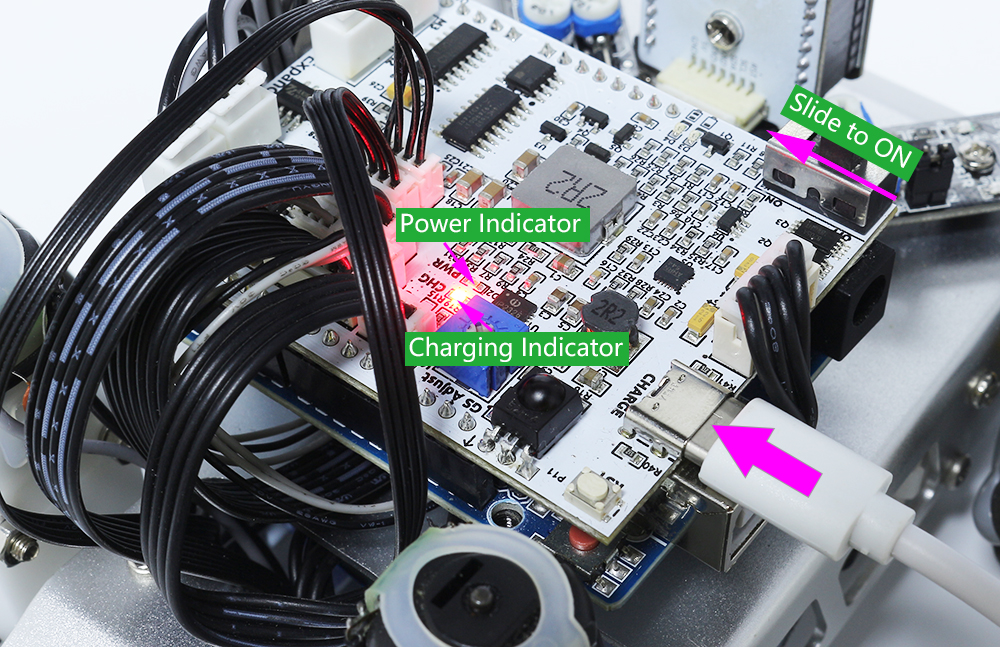
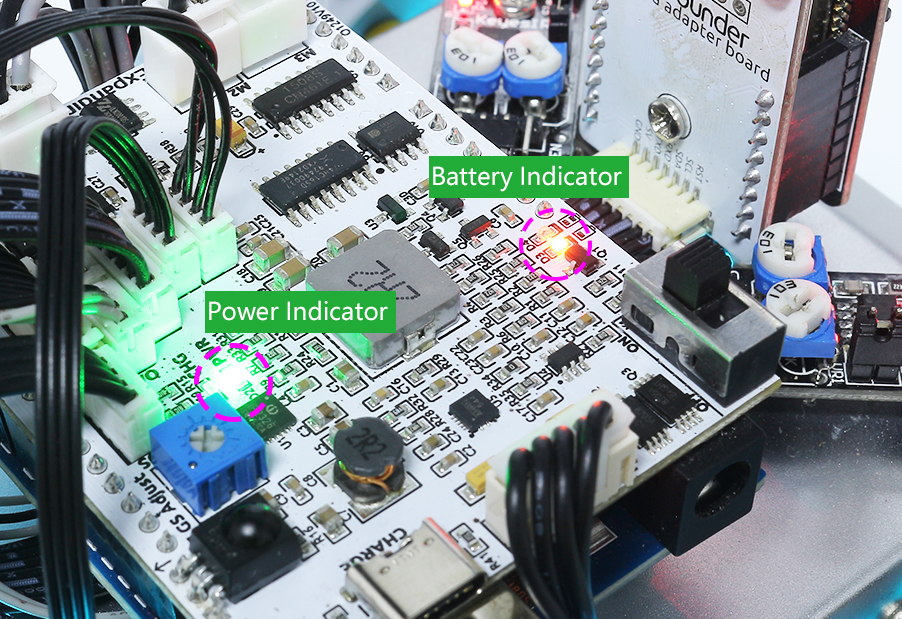
If the power indicator lights up, it means that the protection status has been released. At this time look at the battery indicators, if both battery indicators are off, please continue to plug in the Type-C cable to charge the battery.
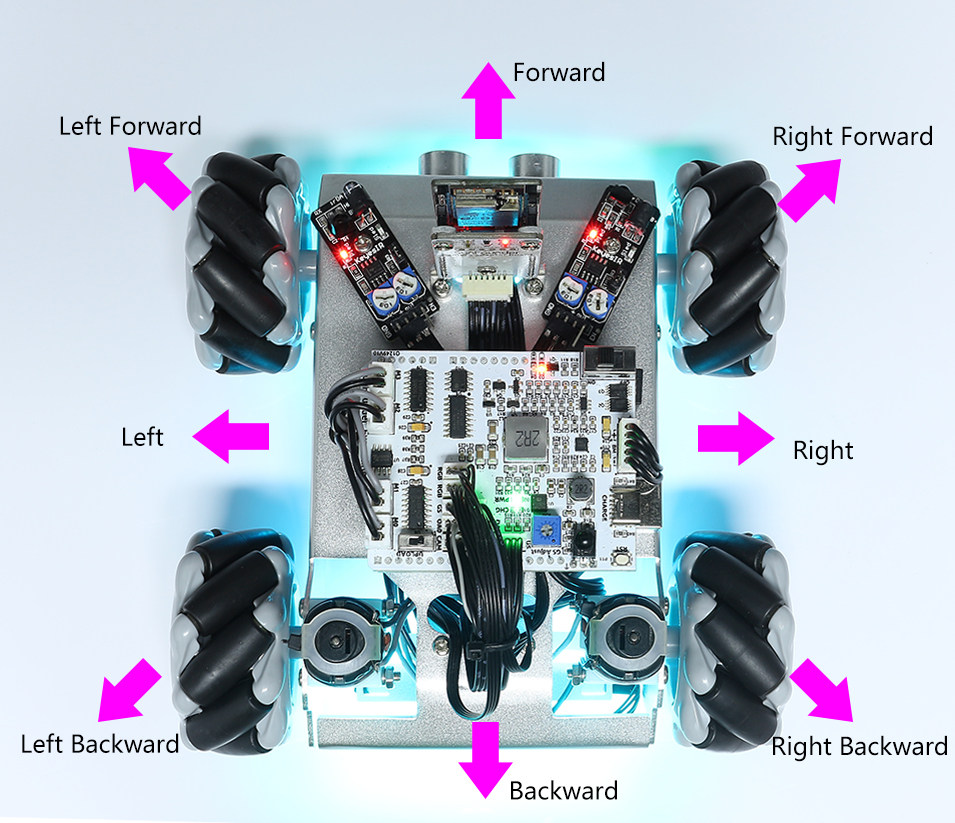
You will now see the Zeus Car move for one second in each direction.
How it works?
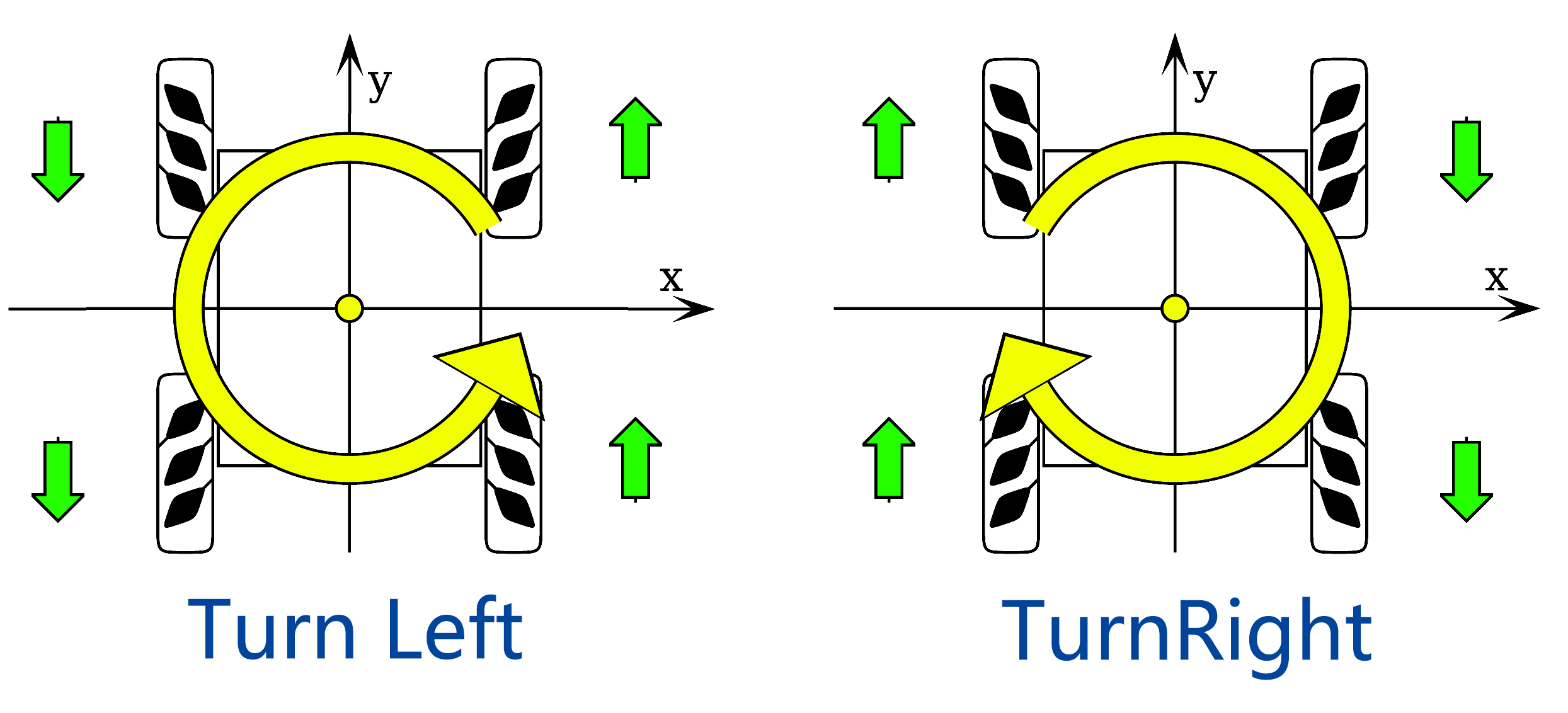
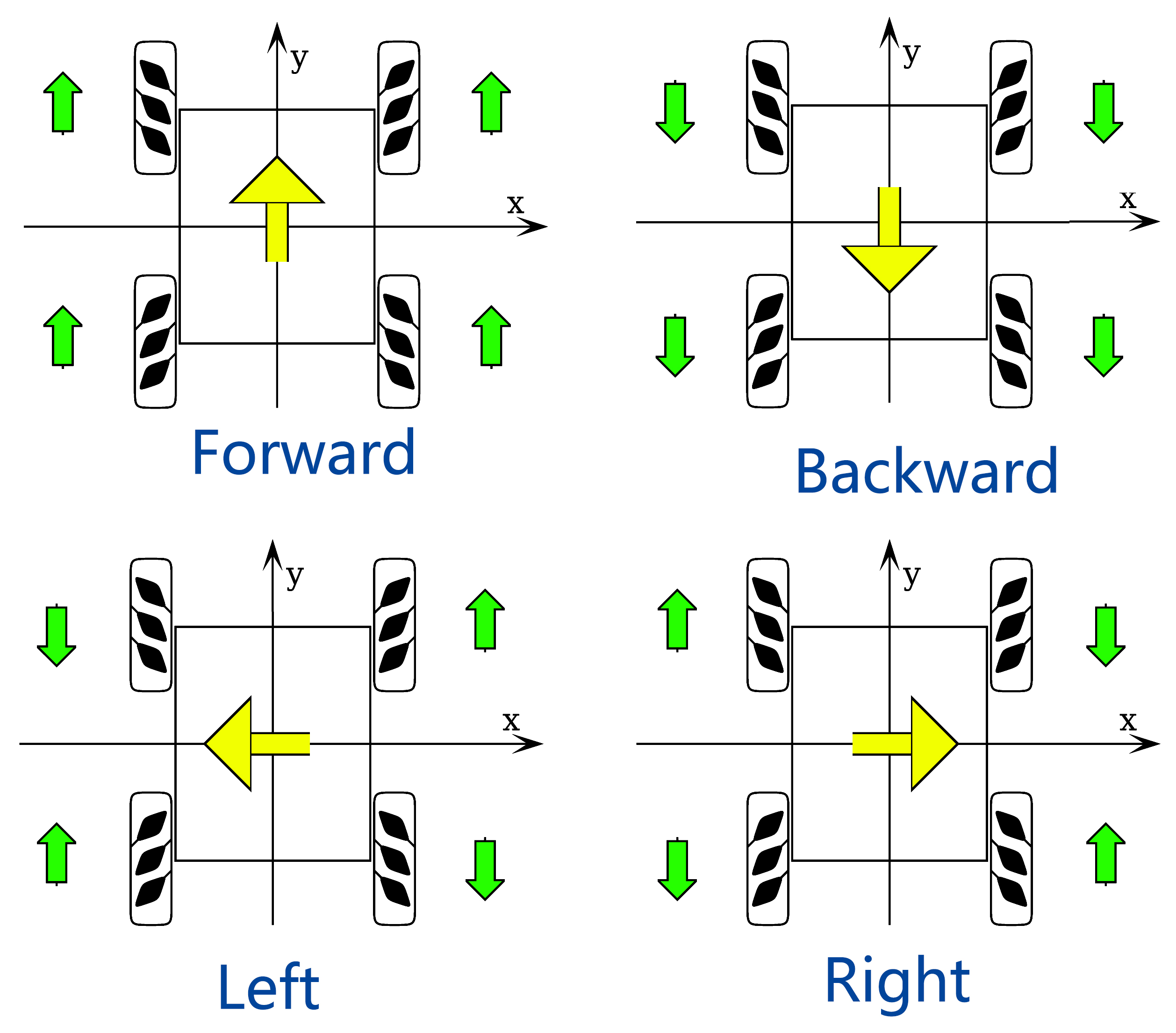
These movements are obtained by the 4 Mecanum Wheels cooperating together, for example, four wheels forward or backward at the same time can make the car also forward or backward, and two wheels forward and two wheels backward can cause the car to pan or rotate to the left or right.
Let’s look at how these movements are specifically achieved.
Moving forward and backward, panning left and right.
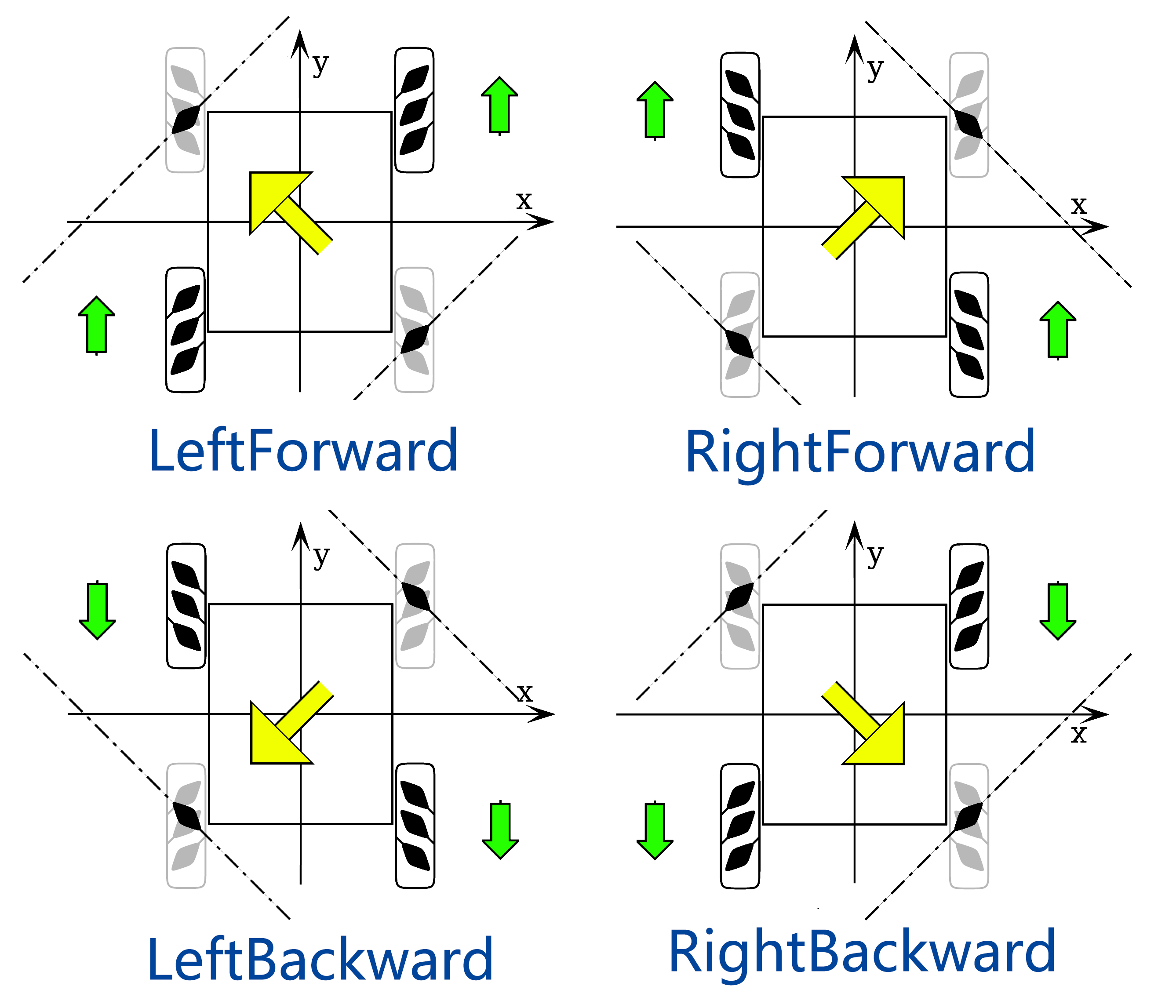
Diagonal panning
Rotate left and right