EzBlock 快速指南
备注
如果你使用的是 Raspberry Pi 5,我们的图形化编程软件 EzBlock 暂不支持。
舵机的角度范围是 -90° ~ 90°,但出厂时的初始角度是随机的,可能是 0°,也可能是 45°。 如果直接在这种角度下进行组装,在机器人运行代码后可能会出现混乱,甚至更糟,会导致舵机卡死烧毁。
因此,我们需要先将所有舵机的角度设置为 0°,再进行安装。这样舵机将处于中位角度,无论向哪个方向转动都能保持正常。
首先,将 Install EzBlock OS (EzBlock 官方教程)烧录到 Micro SD 卡上。安装完成后,将其插入 Raspberry Pi。
备注
安装完成后,请返回本页面继续操作。
为确保舵机已正确归零,先将舵机臂插入舵机轴,再轻轻转动舵机臂到不同角度。舵机臂的作用是方便你直观观察舵机的转动。

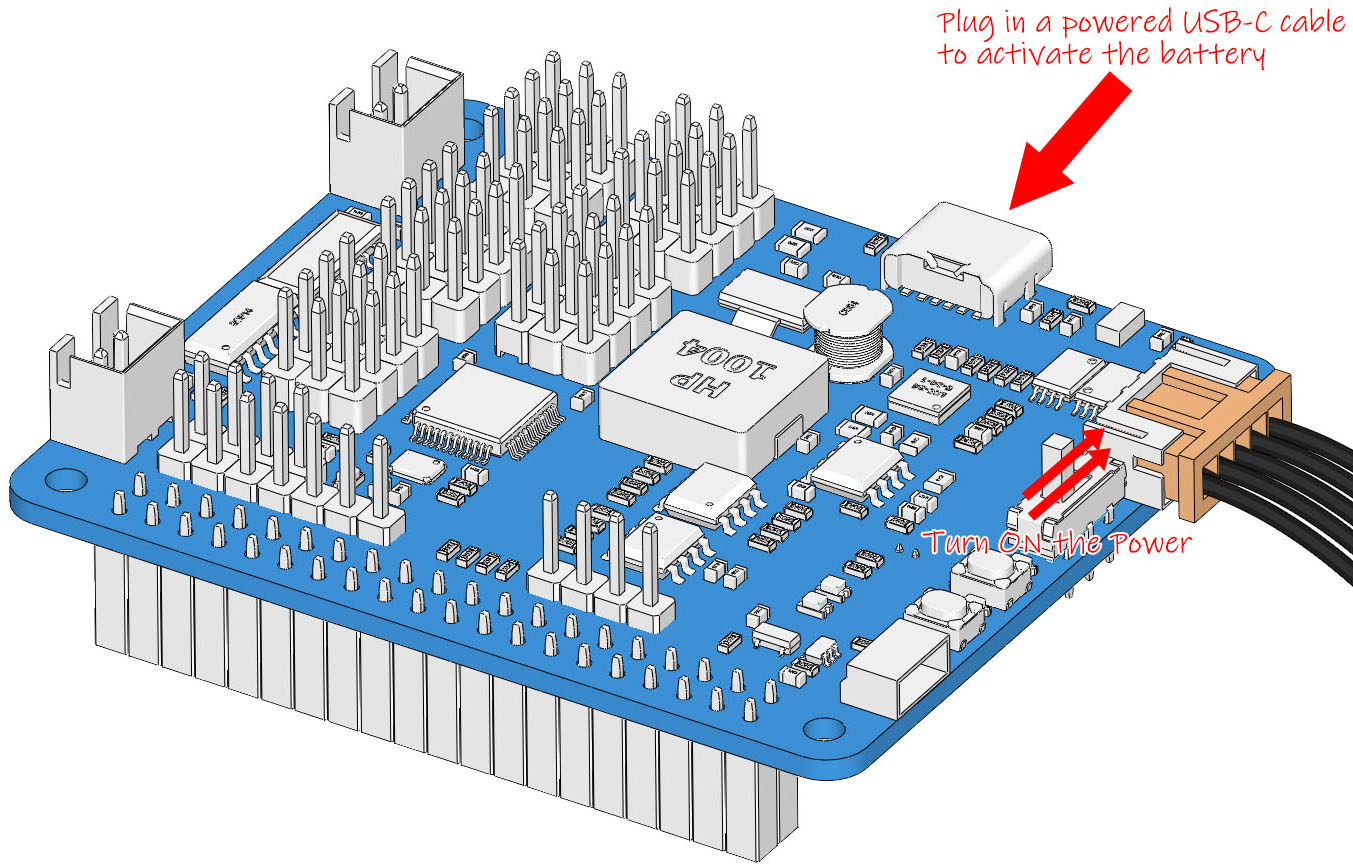
按照装配说明书操作,先插入电池线并将电源开关拨到 ON,再插入一根已供电的 USB-C 线激活电池。等待 1~2 分钟,会听到提示音,表示 Raspberry Pi 启动成功。
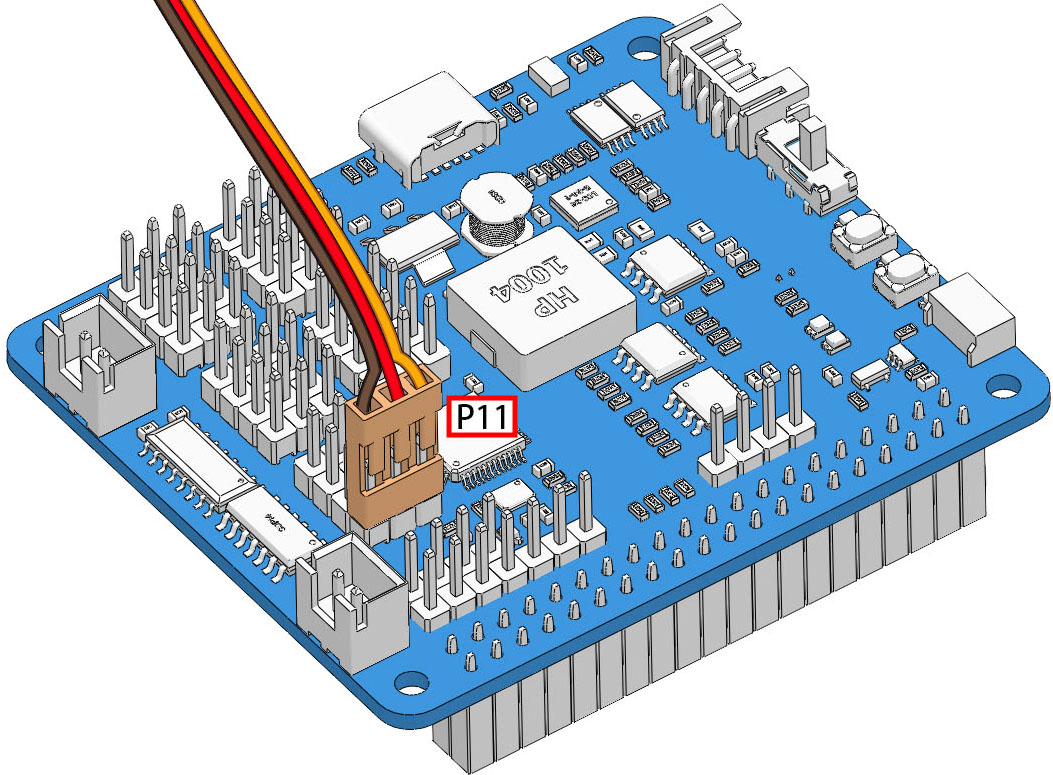
接着,将舵机线插入 P11 端口,如下图所示。
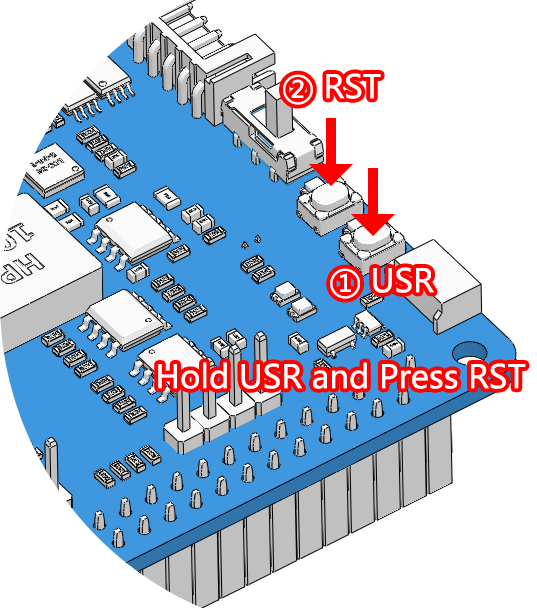
长按 USR 键,然后按下 RST 键,系统将执行舵机归零脚本。 当你看到舵机臂转动到某个位置(此位置即为 0°,它是随机的,可能不是竖直或水平),说明程序已运行完成。
备注
该步骤只需执行一次;之后只需插入其他舵机线,它们会自动归零。
现在,取下舵机臂,保持舵机线连接并且不要断电,然后继续按照纸质装配说明完成组装。
备注
在用螺丝固定舵机前,请勿拔下该舵机线;固定完成后再拔下即可。
舵机通电时不要强行转动,以免损坏;如果舵机轴插入角度有误,请拔出并重新插入。
在组装每个舵机前,都需要先将舵机线插入 P11 并通电,将其角度设为 0°。
当你之后通过 EzBlock APP 向机器人下载程序后,该归零功能将被禁用。