姿态调整
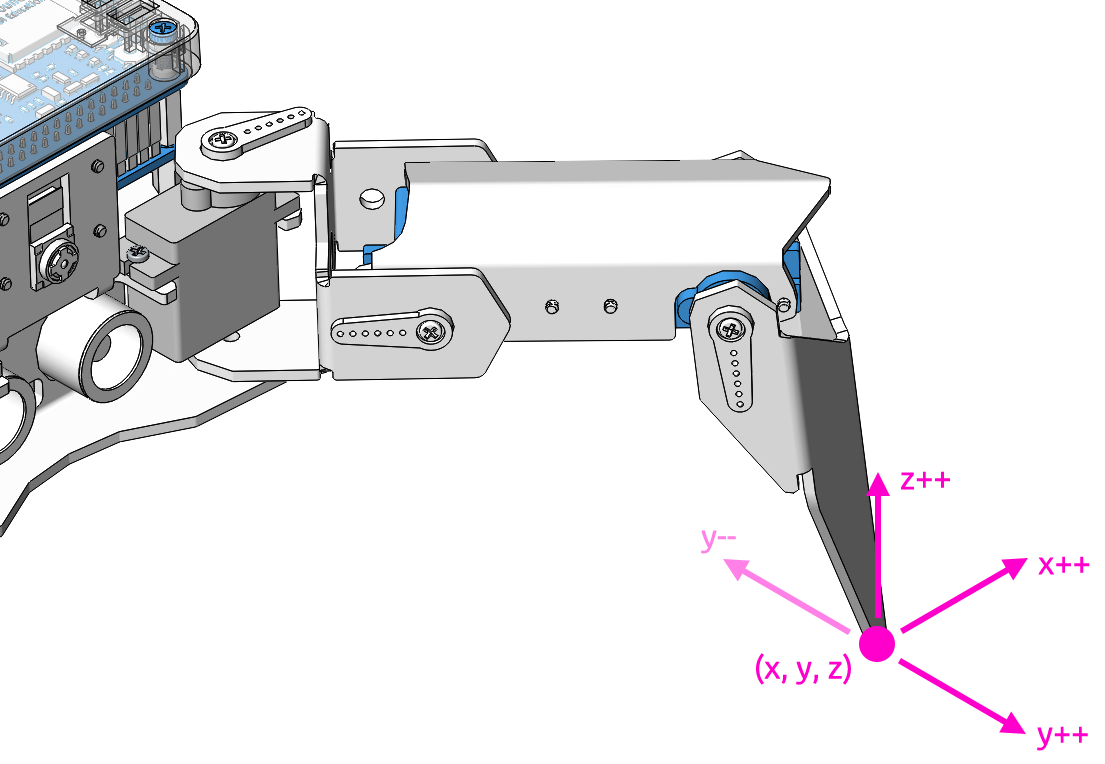
在本示例中,我们通过远程控制功能逐步操控 PiCrawler 的每条腿,从而让其摆出所需的姿态。
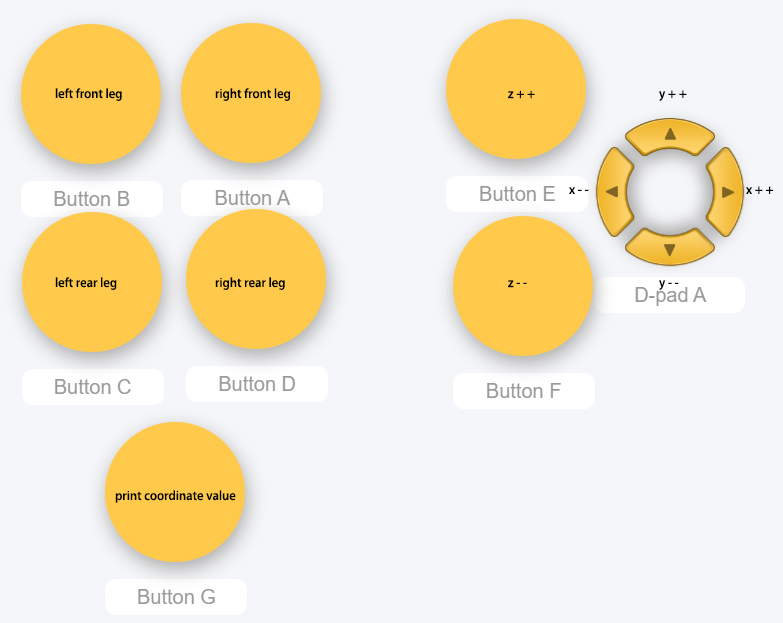
你可以点击按钮打印出当前的坐标值。在为 PiCrawler 创建独特动作时,这些坐标值会非常有用。
Program
备注
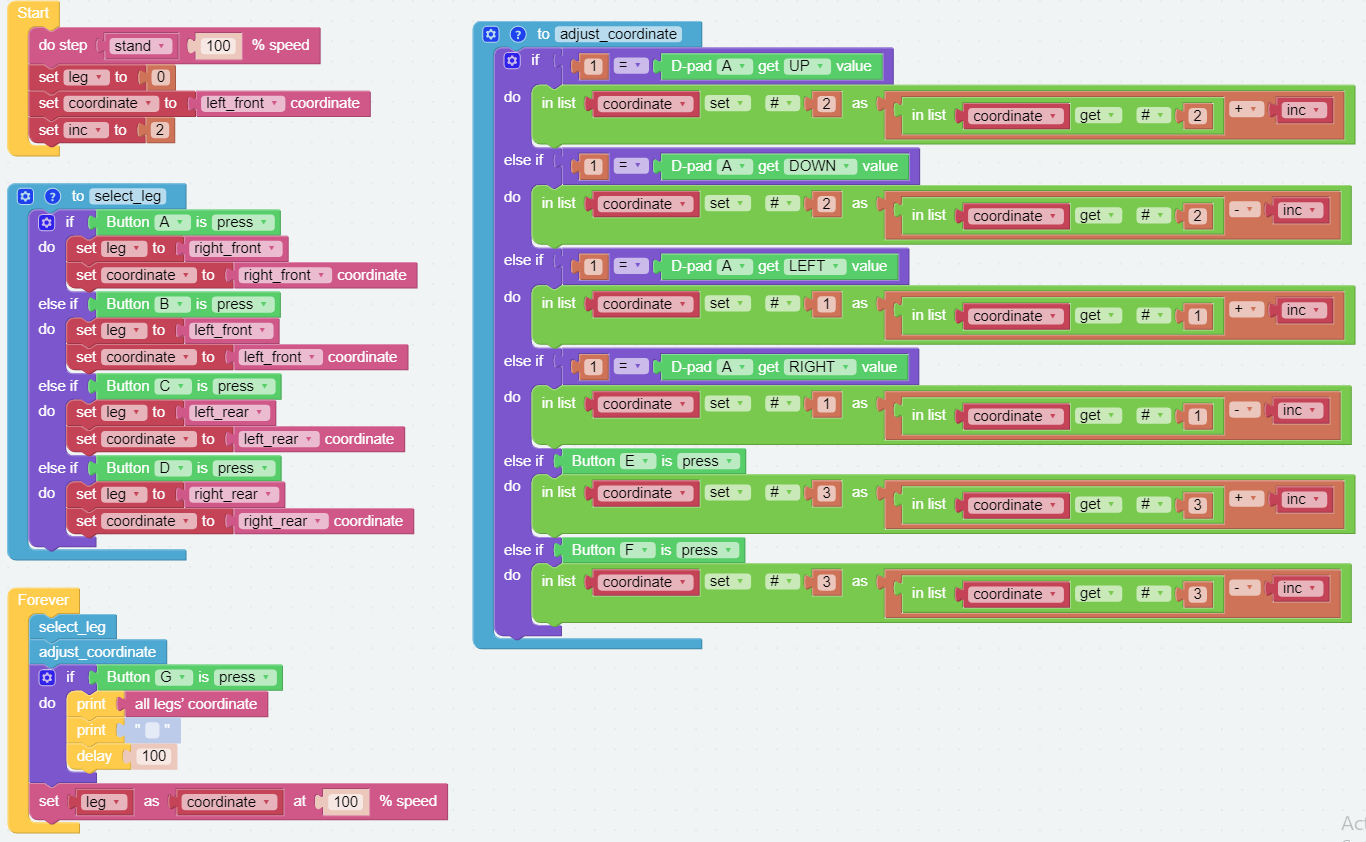
你可以根据下图编写程序,具体操作请参考教程:How to Create a New Project?。
或者在 EzBlock Studio 的 Examples 页面找到同名示例代码,直接点击 Run 或 Edit 运行或修改。
切换到远程控制界面后,你将看到如下组件。
工作原理
在本项目中,你需要重点关注以下三个模块:

用于单独修改某条腿的坐标值。

用于返回对应腿的坐标值。

在编程时,你可能希望通过 Functions 来简化程序,尤其是在需要多次执行相同操作的情况下。将这些操作封装到一个新声明的函数中,可以大大提高使用效率。