避障功能
在本项目中,PiCrawler 将使用超声波模块来检测前方障碍物。 当 PiCrawler 检测到障碍物时,会发出信号,并寻找其他方向继续前进。
Program
备注
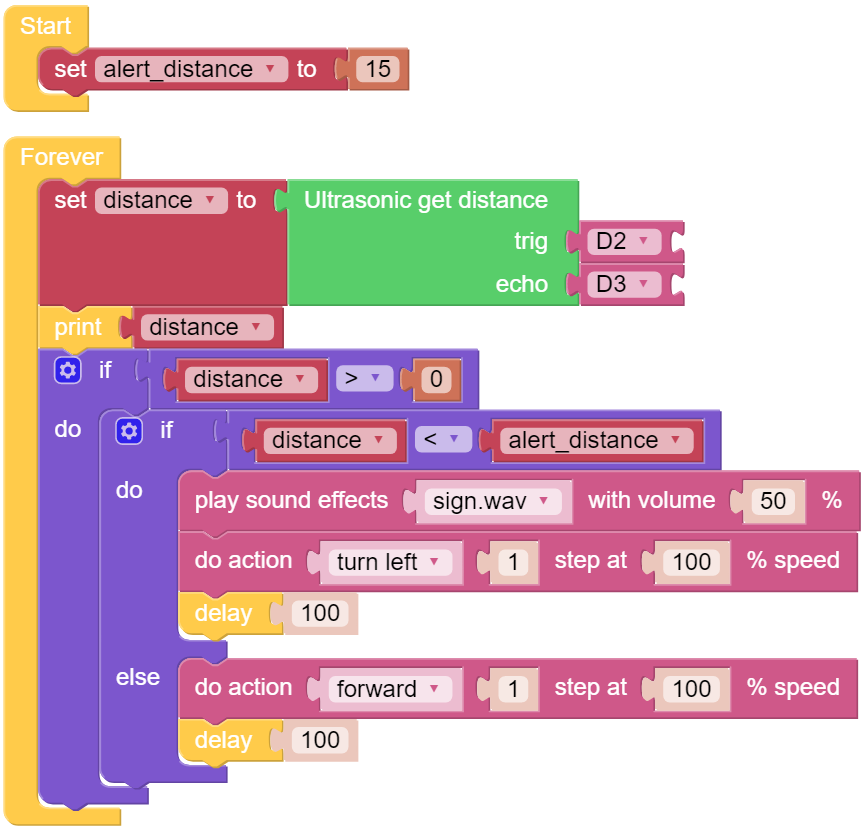
你可以按照下图编写程序,详细操作请参考教程:How to Create a New Project? 。
或者在 EzBlock Studio 的 Examples 页面找到同名示例代码,直接点击 Run 或 Edit 运行或修改。
工作原理
你可以在 Module 分类中找到以下模块,用于实现距离检测:
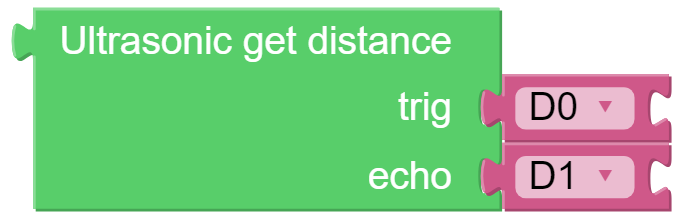
需要注意的是,模块的两个引脚必须与实际接线对应,即 trig-D2,echo-D3。
以下是主程序逻辑:
读取超声波模块检测到的
distance,并过滤掉小于 0 的数值(当超声波模块距离障碍物过远或无法正确读取数据时,会出现distance<0的情况)。当
distance小于alert_distance``(预设阈值,这里设为 10)时,播放音效 ``sign.wav,PiCrawler 执行turn left。当
distance大于alert_distance时,PiCrawler 执行forward。