FAQ
Q1: 安装 Ezblock OS 后,舵机无法转到 0°?
检查舵机线是否正确连接,以及 Robot HAT 电源是否已打开。
按下 Reset 按钮。
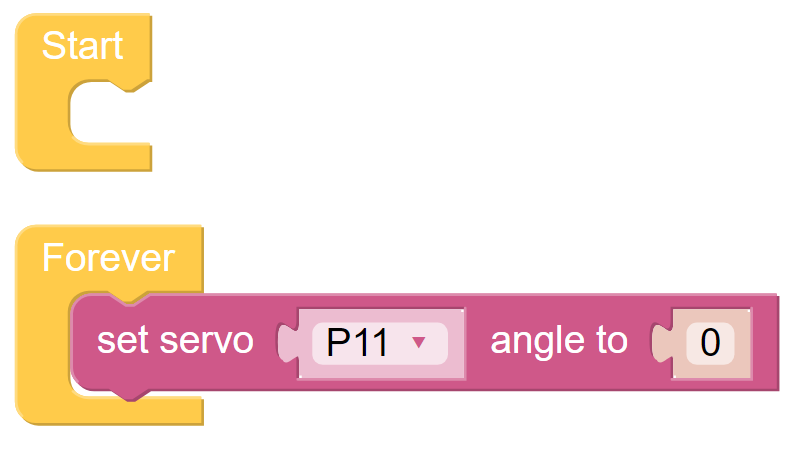
如果你已经在 Ezblock Studio 中运行过程序,那么 P11 的自定义程序将不可用。你可以参考下图,在 Ezblock Studio 中手动编写程序,将舵机角度设置为 0。
Q2: 使用 VNC 时提示暂时无法显示桌面?
在终端中输入 sudo raspi-config 修改分辨率。
Q3: 为什么舵机有时会无缘无故回到中间位置?
当舵机被结构或其他物体阻挡,无法到达目标位置时,会自动进入断电保护模式,以避免因电流过大而烧毁舵机。
在断电一段时间后,如果没有继续给舵机输入 PWM 信号,它会自动回到初始位置。
Q4: 关于 Robot HAT 的详细教程?
你可以在这里找到关于 Robot HAT 的完整教程,其中包含硬件信息及 API 使用方法。
Q5: 关于电池充电器?
要为电池充电,只需将 5V/2A 的 Type-C 电源适配器连接到 Robot HAT 的电源接口。充电过程中无需打开 Robot HAT 的电源开关。 你也可以在充电时正常使用设备。
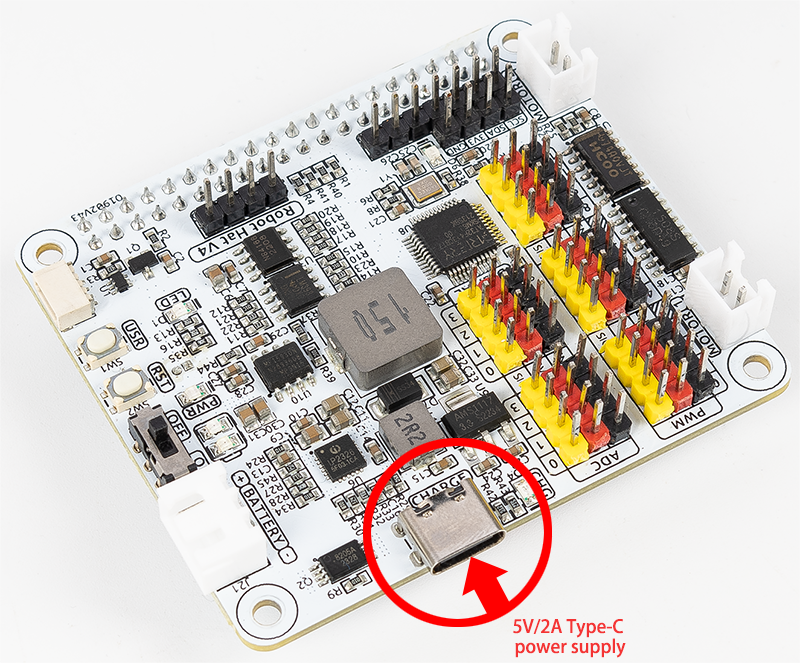
在充电过程中,充电芯片会将输入电源升压,为电池充电的同时也为 DC-DC 转换器供电,整体充电功率约为 10W。 如果外部负载长时间保持较高功耗,电池可能会辅助供电,这类似于边充电边使用手机。 不过需要注意电池容量,避免在充电和使用同时进行时将电池完全耗尽。
Q6: 关于 PiCamera 的安装?
根据你的 Raspberry Pi 型号(Raspberry Pi 5/4/Zero 2 W 型号)安装 PiCamera。