姿态
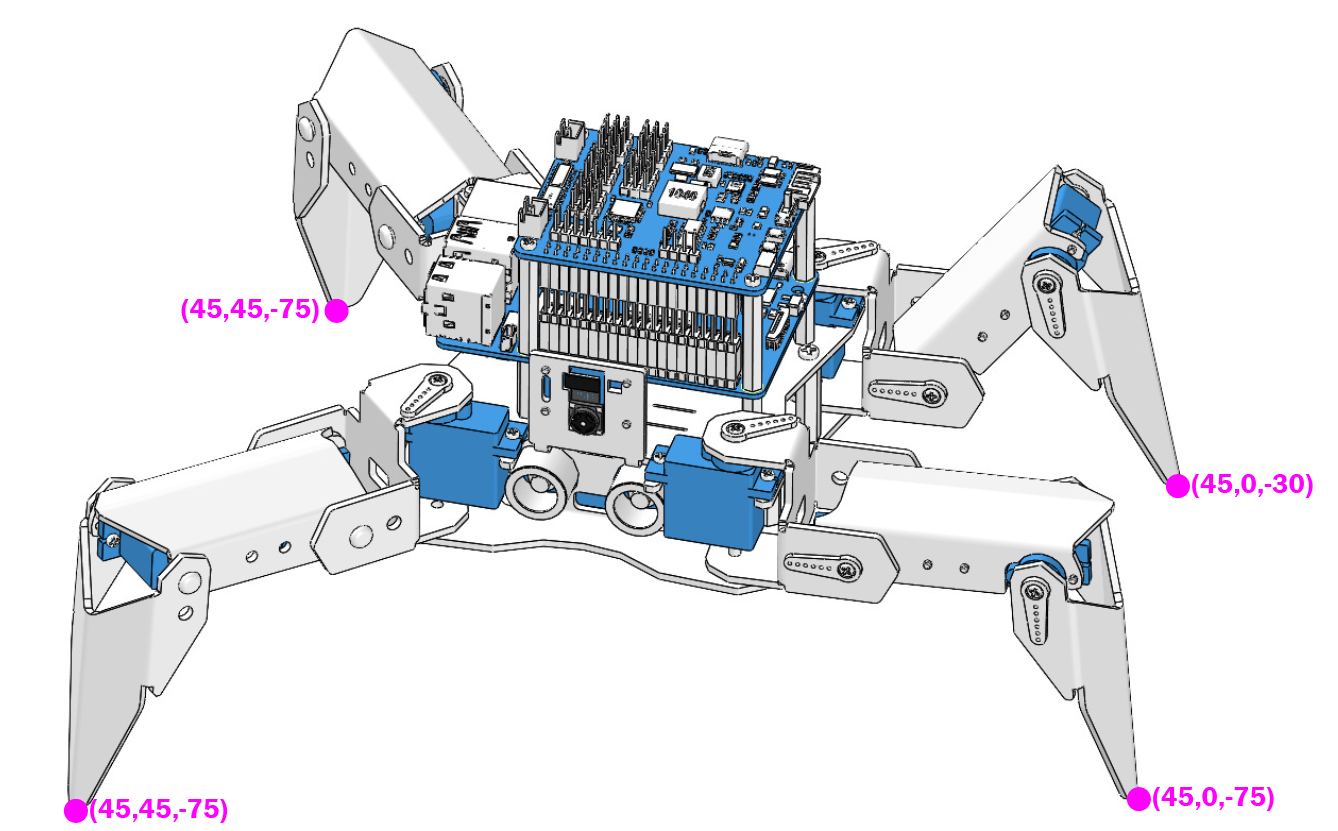
通过编写坐标数组,PiCrawler 可以摆出特定的姿态。这里展示的是抬起右后脚的姿势。
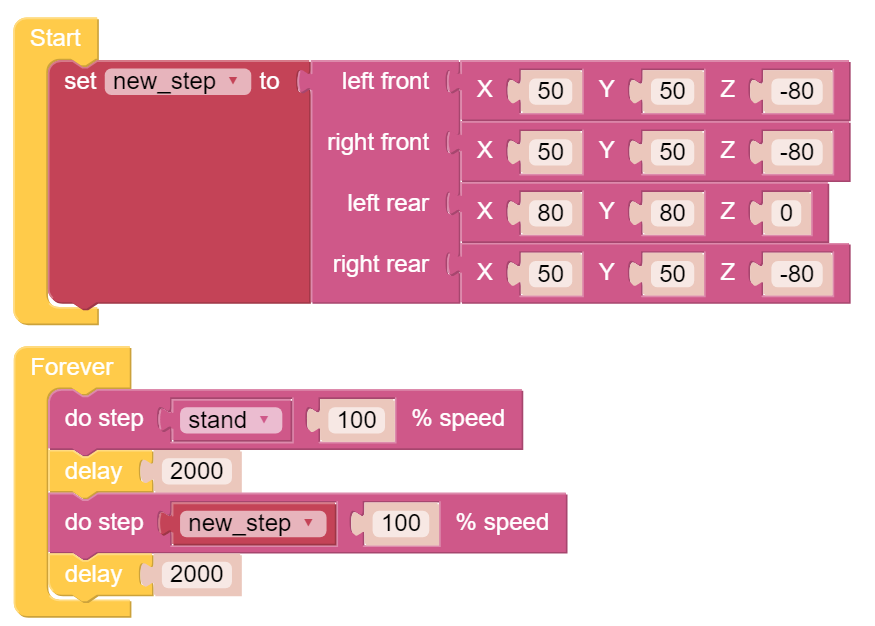
Program
备注
你可以根据下图编写程序,详细操作请参考教程:How to Create a New Project?。
或者在 EzBlock Studio 的 Examples 页面找到同名示例代码,直接点击 Run 或 Edit 运行或修改。
工作原理
在本代码中,需要特别注意的是 do step。
它有两种用法:
可以直接调用 stand 或 sit。
也可以编写包含 4 个坐标值的数组。
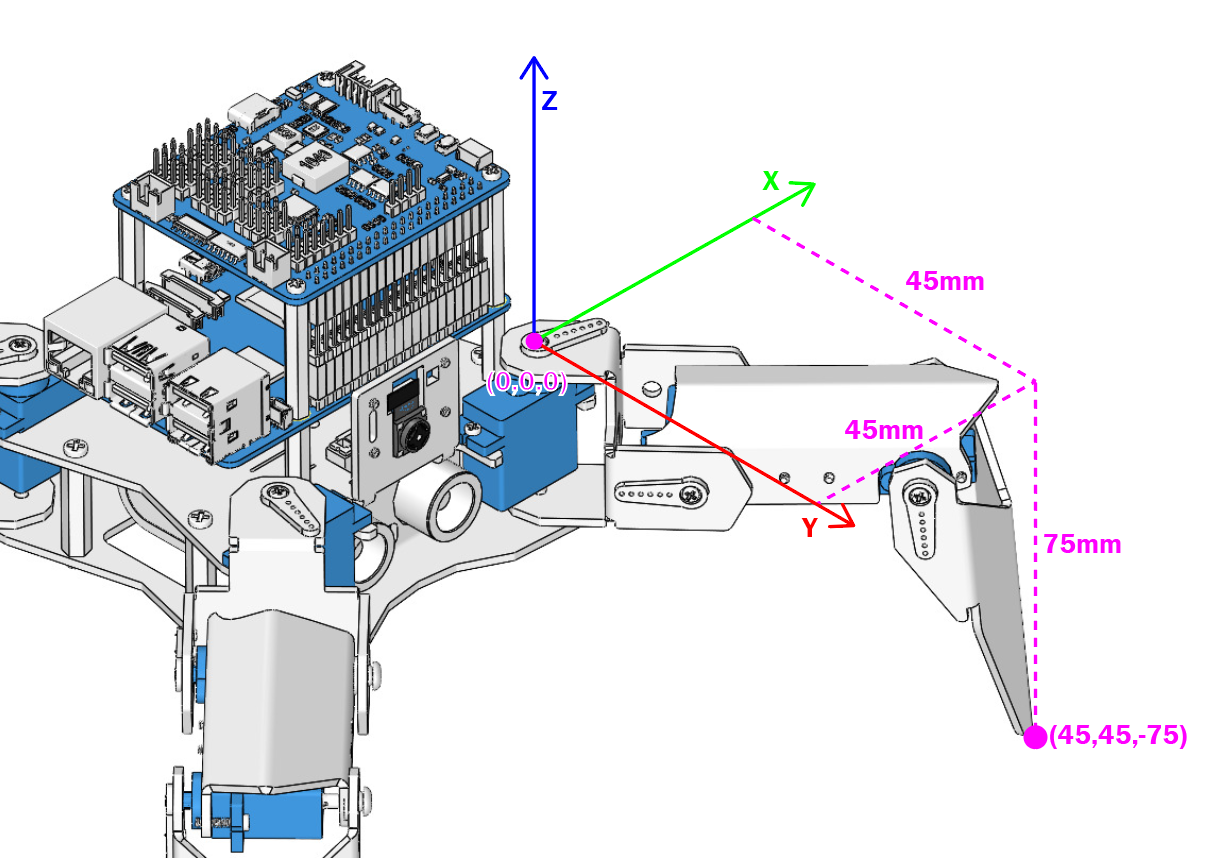
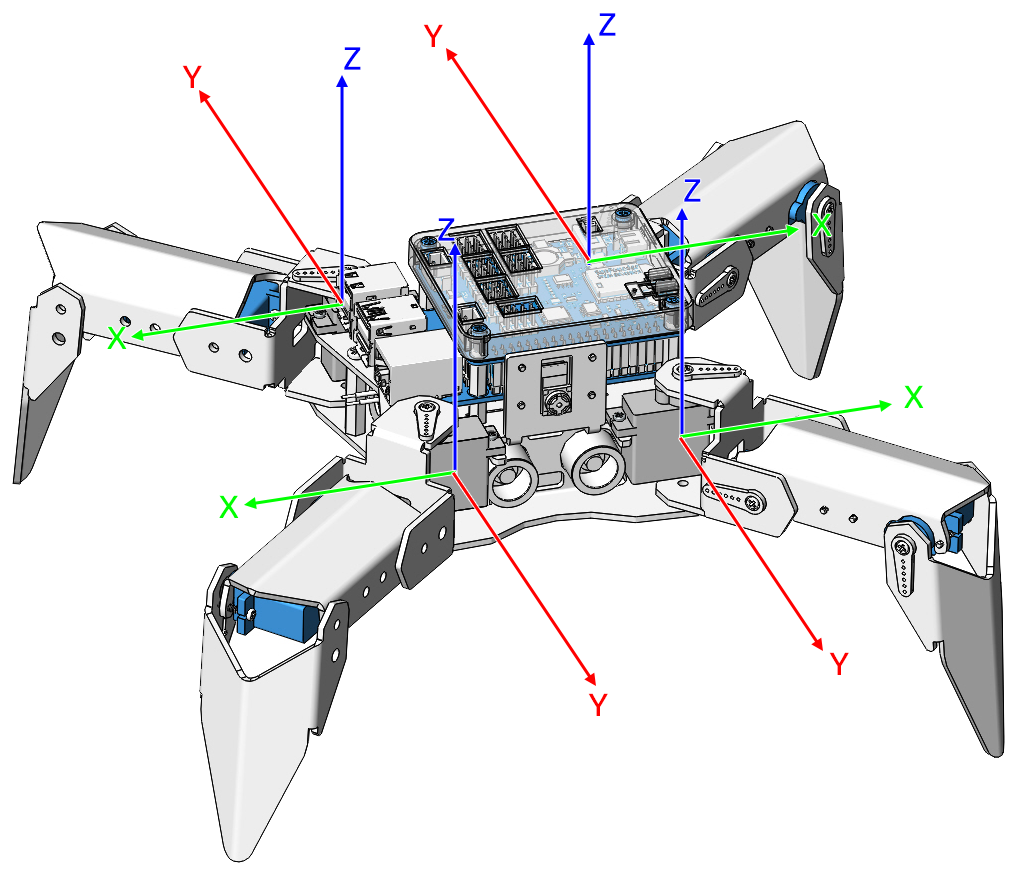
每只脚都有独立的坐标系,如下图所示:
你需要分别测量每个脚趾的坐标,如下图所示: