校准 PiCrawler
连接 PiCrawler 后,需要进行一次校准。这是因为在组装过程中可能存在微小误差,或者舵机本身存在一定的精度限制,导致部分舵机角度略有偏差,因此需要通过此步骤进行校准。
如果你认为装配完全准确且无需调整,也可以跳过该步骤。
备注
如果在使用过程中需要重新校准机器人,请按照以下步骤操作。
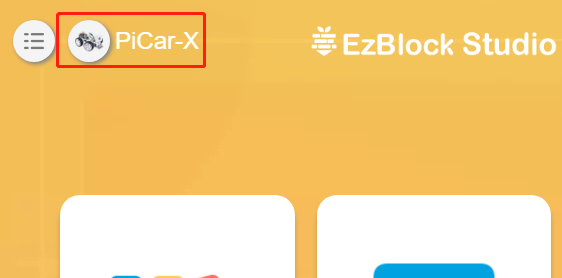
点击左上角的连接图标,打开产品详情页。
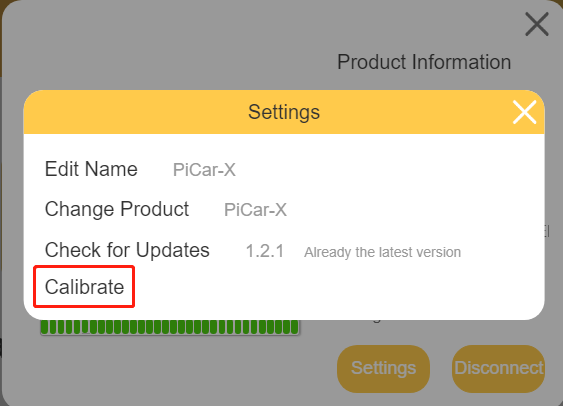
点击 Settings 按钮。

在该页面中,你可以修改产品名称、产品类型、查看应用版本或对机器人进行校准。点击 Calibrate 后即可进入校准页面。
校准步骤如下:
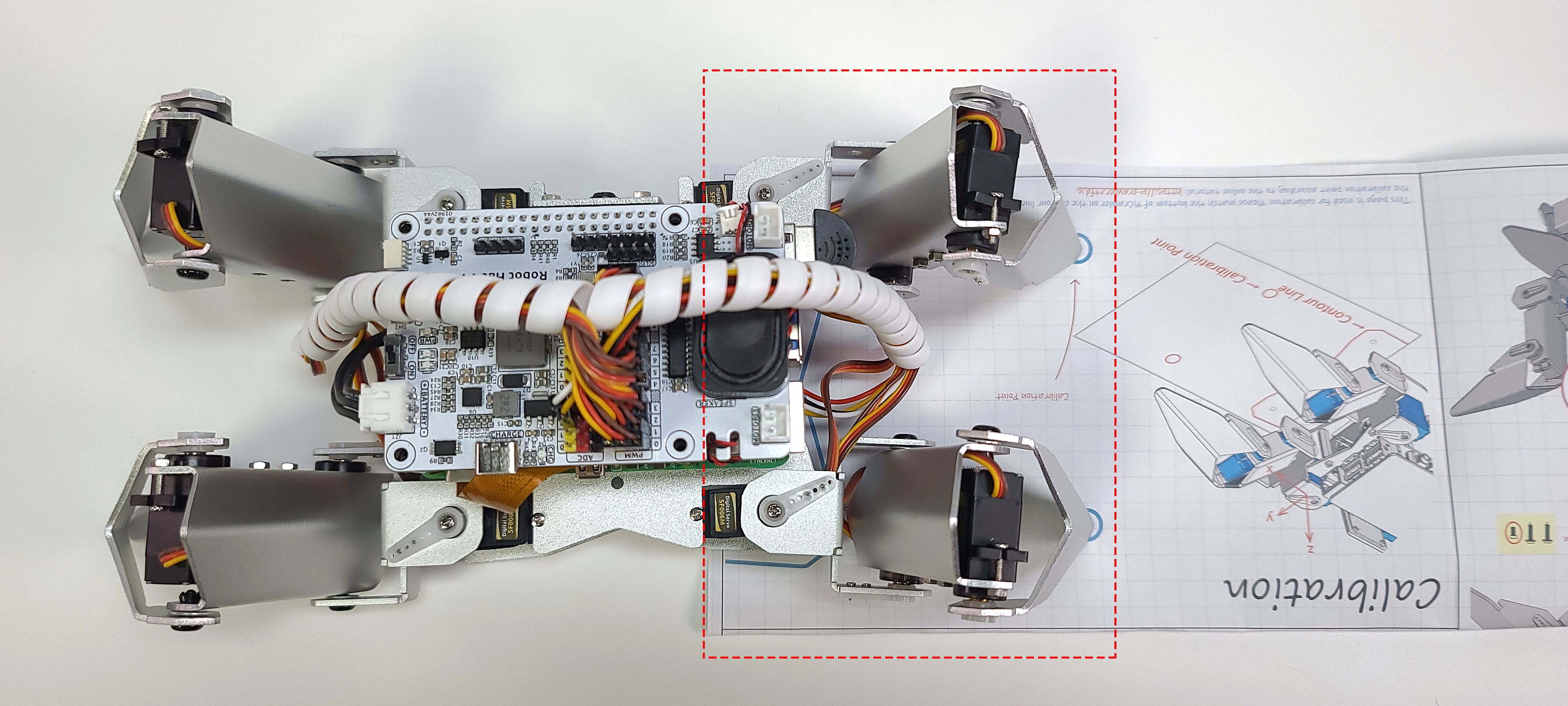
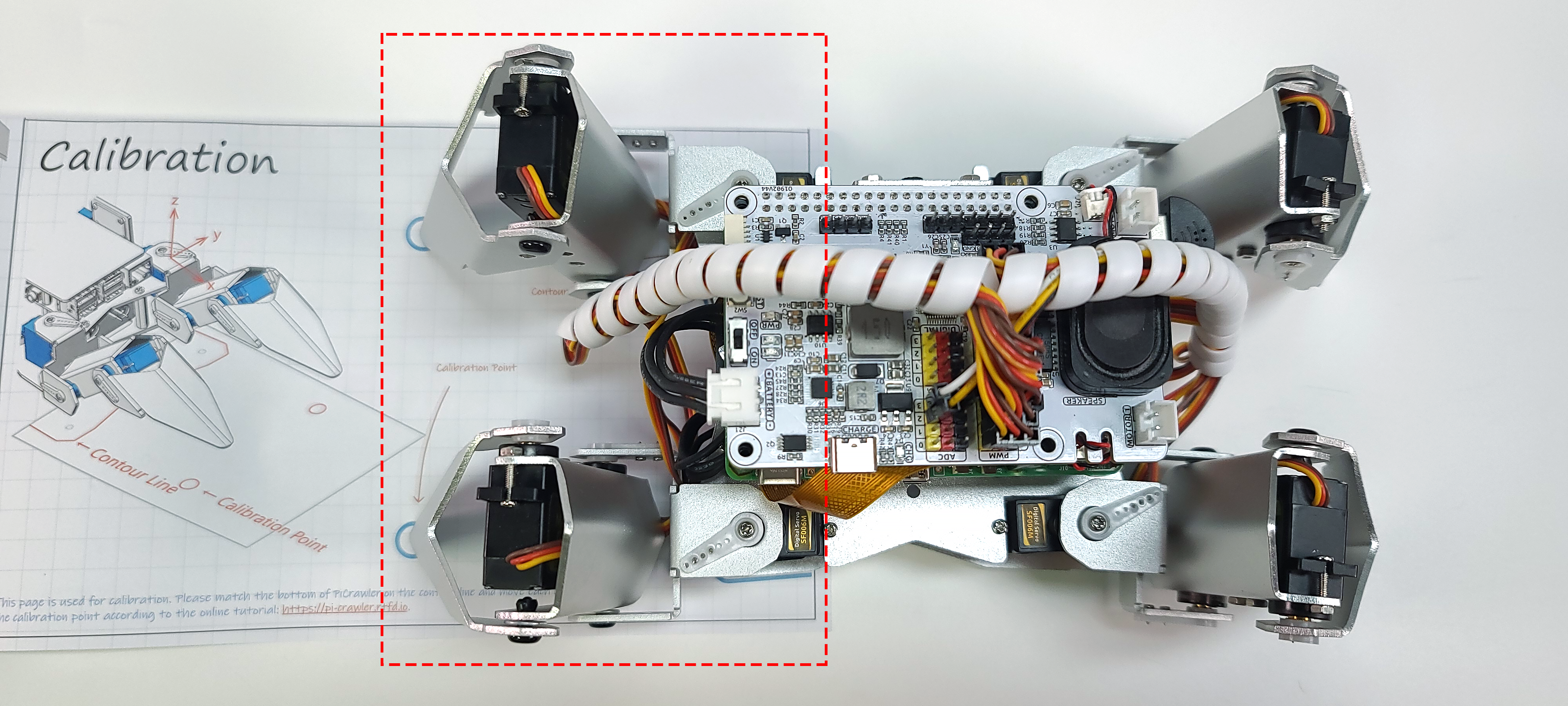
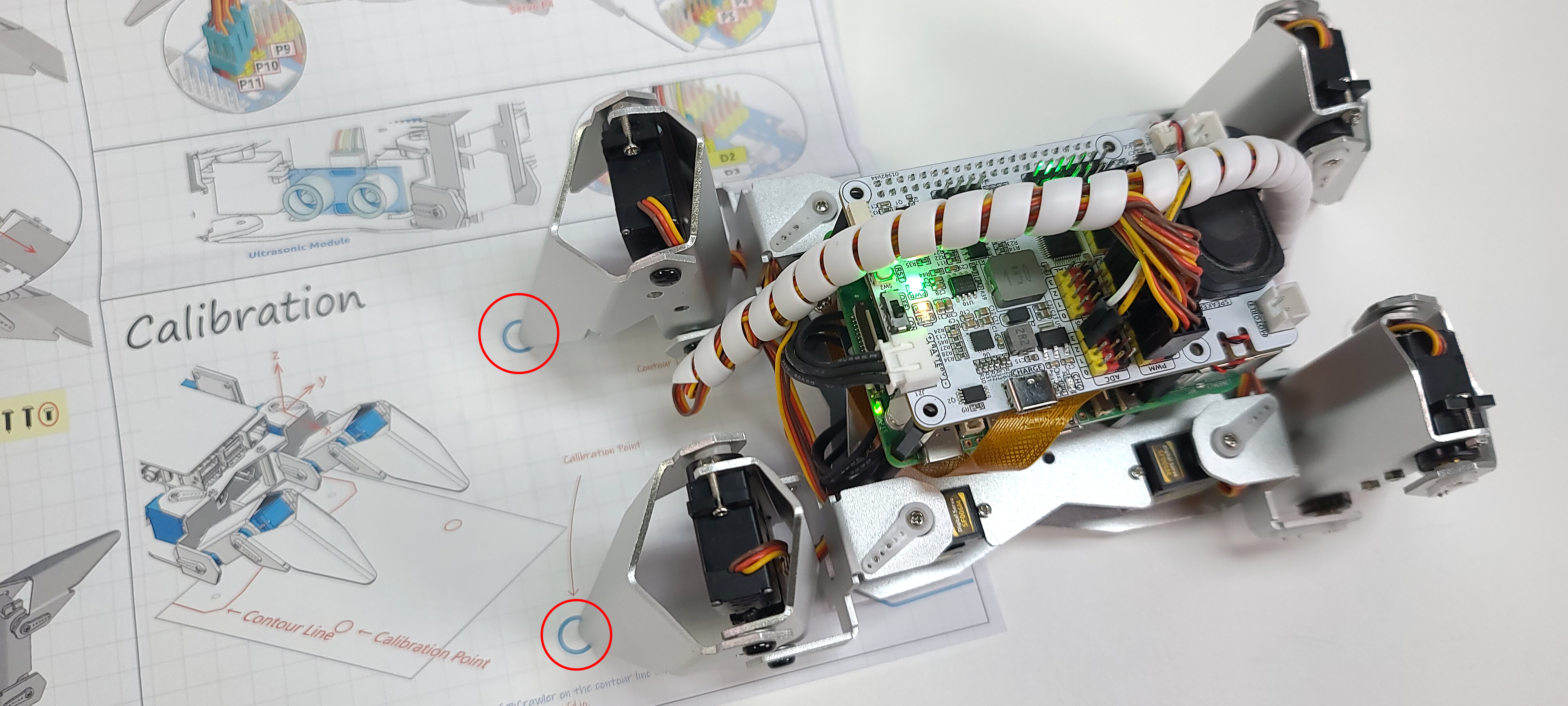
取出装配说明书,翻到最后一页并平放在桌面上。然后将 PiCrawler 按下图所示方式放置,使其底部与校准图纸上的轮廓对齐。
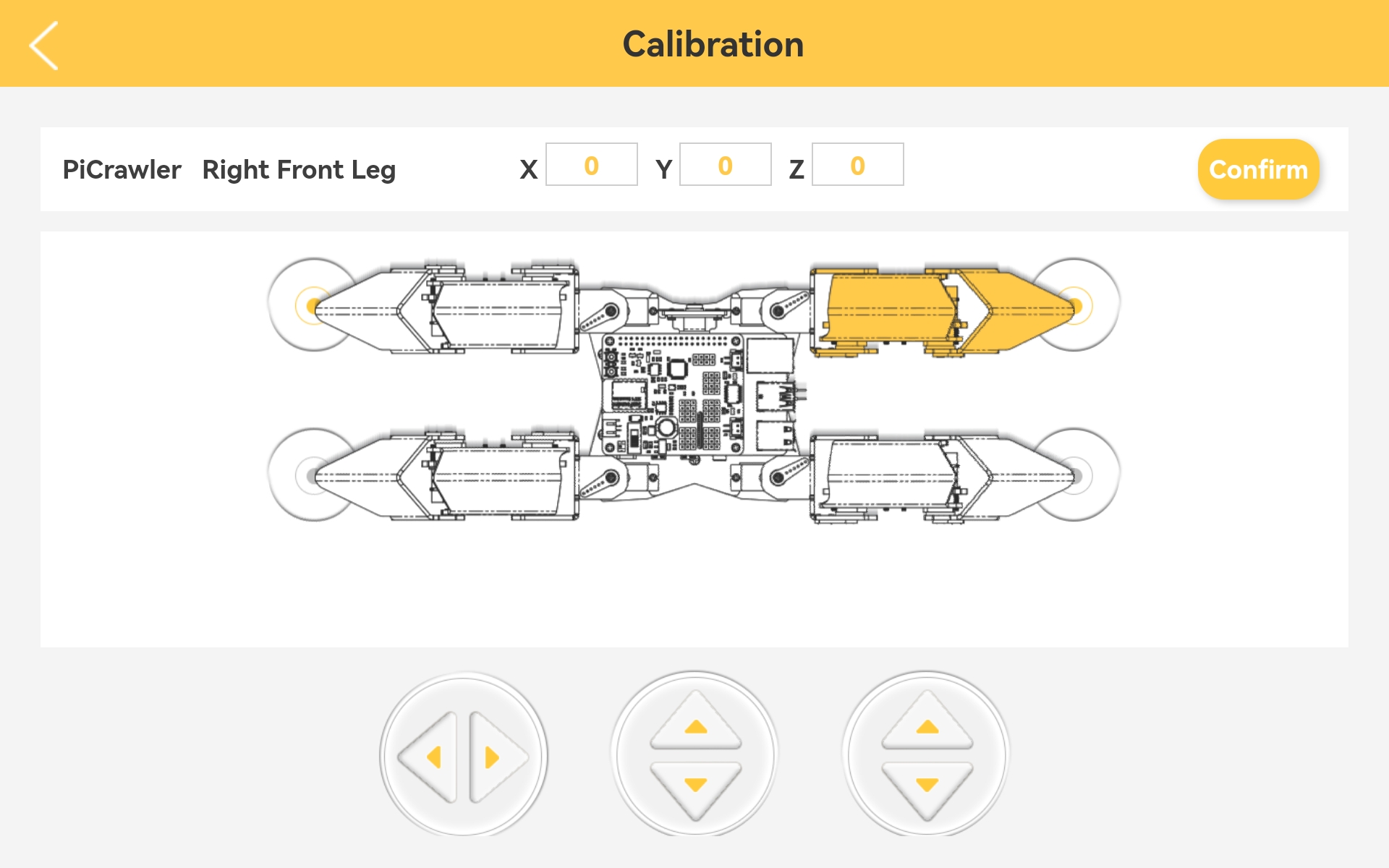
返回 EzBlock Studio,选择左侧的一只脚,然后依次点击 X、Y、Z 三组按钮,使脚趾缓慢对准校准点。
校准按钮用于微调,需要多次点击才能看到针脚位置的变化。
建议先点击 Z 轴的上升按钮,将脚抬起,再去调整 X 和 Y 轴。
以相同方式校准左侧的另一只脚。
左侧两只脚校准完成后,将校准纸移至右侧,并按照相同方法完成右侧两只脚的校准。