注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[here]をクリックして今すぐ参加しましょう!
EzBlockのクイックガイド
サーボの角度範囲は-90〜90度ですが、工場での設定角度はランダムで、0°であるかもしれませんし、45°であるかもしれません。このような角度でそのまま組み立てると、ロボットがコードを実行した後に混乱した状態になるか、もっと悪い場合はサーボがブロックして焼け出す原因となります。
まず、Install EzBlock OS (EzBlockの公式チュートリアル)をMicro SDカードにインストールしてください。インストールが完了したら、Raspberry Piに挿入してください。
注釈
インストールが完了したら、このページに戻ってください。

サーボが正確に0°に設定されていることを確認するため、まずサーボアームをサーボシャフトに挿入し、ロッカーアームを別の角度にゆっくりと回転させます。このサーボアームは、サーボが回転していることをはっきりと確認するためのものです。

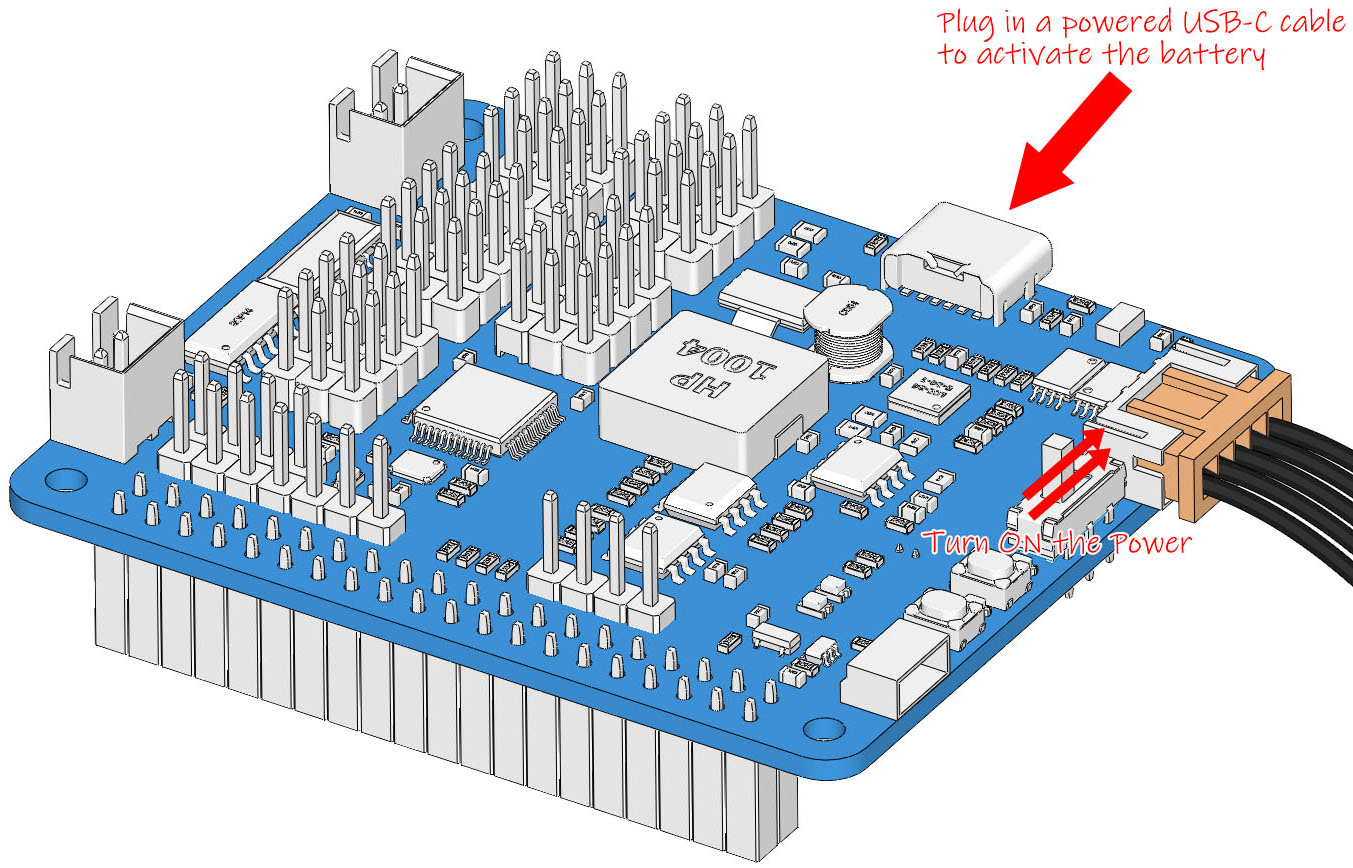
組み立ての説明書に従い、バッテリーケーブルを挿入し、電源スイッチをONにします。その後、電源を供給するUSB-Cケーブルを挿入して、バッテリーをアクティブ化します。1-2分待つと、Raspberry Piが正常に起動したことを示す音がします。
次に、サーボケーブルを以下のようにP11ポートに接続します。

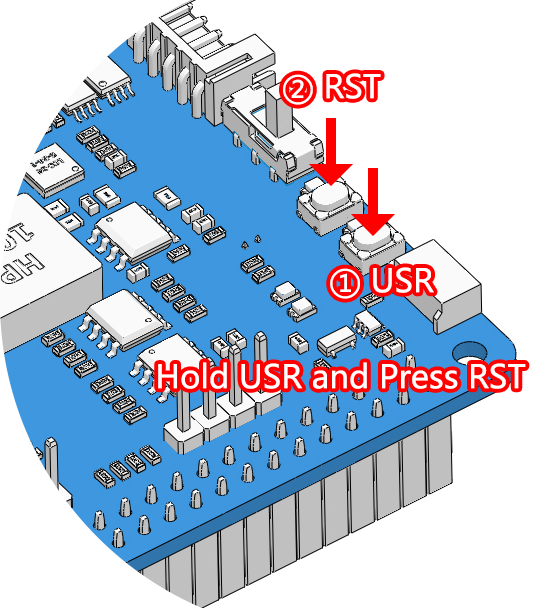
USR キーを押し続け、 RST キーを押すと、システム内のサーボゼロリングスクリプトが実行されます。サーボアームが位置に回転するのを見たとき(これは0°の位置であり、ランダムな位置であり、垂直または平行であるとは限りません)、それはプログラムが実行されたことを示しています。
注釈
この手順は一度だけ実行する必要があります。その後、他のサーボワイヤーを挿入するだけで、自動的にゼロになります。
さて、サーボアームを取り外し、サーボワイヤーが接続されたままにし、電源を切らないでください。その後、紙の組み立て説明書に従って組み立てを続けてください。
注釈
サーボをサーボネジで固定する前にこのサーボケーブルを抜かないでください。固定した後に抜くことができます。
電源が入っている状態でサーボを回転させないでください。ダメージの原因となります。もしサーボシャフトが間違った角度で挿入されていた場合、サーボを引き抜いて再度挿入してください。
各サーボを組み立てる前に、サーボケーブルをP11に挿入し、電源を入れてその角度を0°に設定する必要があります。
あとでEzBlock APPでロボットにプログラムをダウンロードすると、このゼロリング機能は無効になります。