注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[here]をクリックして今すぐ参加しましょう!
マインカートプラス
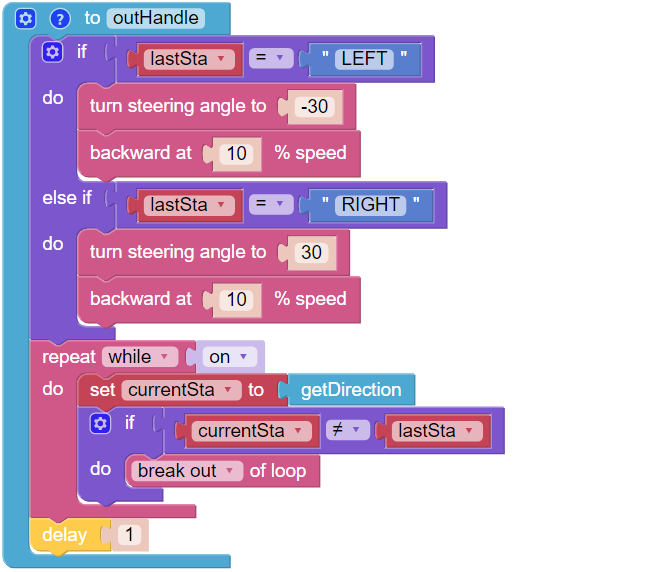
このプロジェクトでは、マインカート プロジェクトに脱線復旧が追加され、PiCar-Xがさらに厳しいカーブから適応して復旧することができます。

ヒント
もう一つの to do something ブロックを使用して、PiCar-Xが鋭いカーブからバックアップして復旧できるようにします。新しい to do something 関数は値を返さないことに注意してください。この関数はPiCar-Xの方向を再設定するためだけに使用されます。
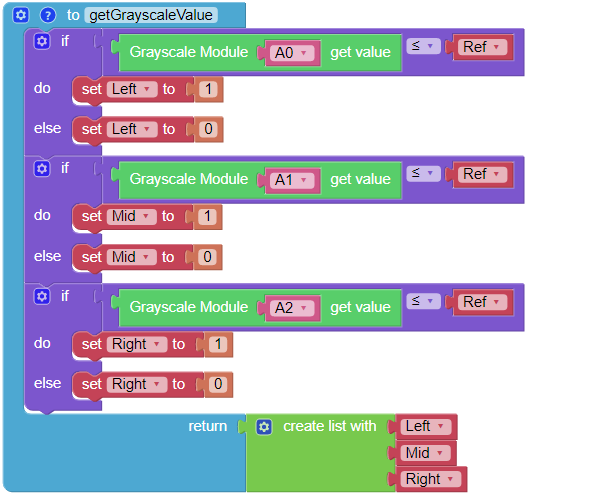
Set ref to () ブロックは、グレースケールのしきい値を設定するために使用されます。実際の状況に応じて変更する必要があります。白と黒の表面でのグレースケールモジュールの値を確認するために、 グレースケールモジュールのテスト を実行してみてください。このブロックにその中間値を記入します。
例
注釈
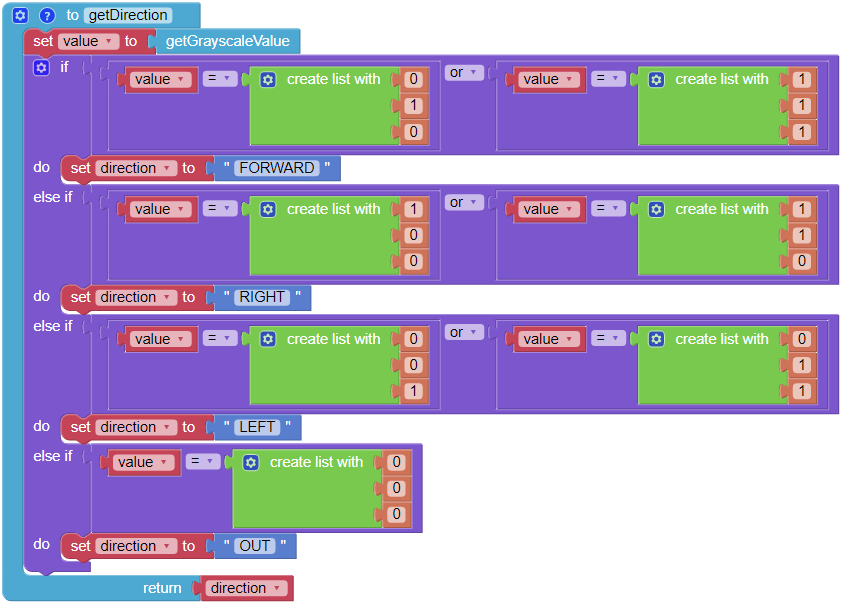
以下の画像に従ってプログラムを書くことができます。チュートリアルを参照してください: How to Create a New Project?。
EzBlock Studioの Examples ページで同じ名前のコードを見つけ、 Run または Edit を直接クリックしてください。