注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[here]をクリックして今すぐ参加しましょう!
超音波モジュールのテスト
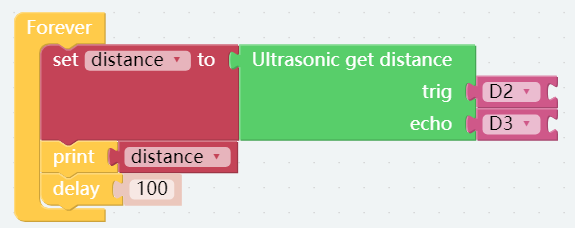
PiCar-Xには、障害物回避や自動的な物体追尾の実験に使用できる組み込みの超音波センサーモジュールがあります。 このレッスンでは、モジュールがセンチメートルでの距離(24 cm = 1 inch)を読み取り、結果を Debug ウィンドウで Print します。
TIPS

Ultrasonic get distance ブロックは、PiCar-Xから直前の障害物までの距離を読み取ります。

このプログラムは Variable を使用して簡略化されています。例えば、プログラム内に複数の関数があり、それぞれが障害物までの距離を使用する必要がある場合、各関数が別々に同じ値を読み取るのではなく、 Variable を使用して各関数に同じ距離値を報告することができます。

Variables カテゴリの Create variable... ボタンをクリックし、ドロップダウン矢印を使用して“distance”という名前の変数を選択します。

Print 関数は、デバッグのために変数やテキストなどのデータを印刷することができます。

コードが実行中の場合、左下の角にある Debug アイコンをクリックしてデバッグモニターを有効にします。
例
注釈
以下の画像に従ってプログラムを書くことができます。チュートリアルを参照してください: How to Create a New Project?。
EzBlock Studioの Examples ページで同じ名前のコードを見つけ、 Run または Edit を直接クリックしてください。