注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[here]をクリックして今すぐ参加しましょう!
車のキャリブレーション
PiCar-Xを接続した後、キャリブレーションの手順があります。これは、取り付けの過程での微妙なずれやサーボ自体の制約により、一部のサーボの角度が若干傾いている可能性があるためです。この手順でそれらを調整することができます。
しかし、組み立てが完璧でキャリブレーションが不要と感じる場合、この手順をスキップすることもできます。
注釈
使用中にロボットのキャリブレーションを再度行いたい場合は、以下の手順に従ってください。
左上の接続アイコンをクリックして製品詳細ページを開きます。

設定 ボタンをクリックします。

このページでは、製品名や製品タイプの変更、アプリのバージョンの確認、またはロボットのキャリブレーションができます。 キャリブレート をクリックすると、キャリブレーションページに移動します。

キャリブレーションの手順は次のとおりです:
キャリブレーションページに移動すると、キャリブレーションを行う場所を指示する2つのプロンプトポイントが表示されます。
注釈
キャリブレーションは微調整の過程です。ボタンを限界までクリックしても部品がまだ合っていない場合、部品を取り外し、再度組み立てることをおすすめします。

左のプロンプトポイントをクリックして、PiCar-Xのパン・チルト(カメラ部分)をキャリブレートします。右側の2組のボタンを使用して、パン・チルトの向きをゆっくりと調整し、その角度を確認することができます。調整が完了したら、 確認 をクリックします。

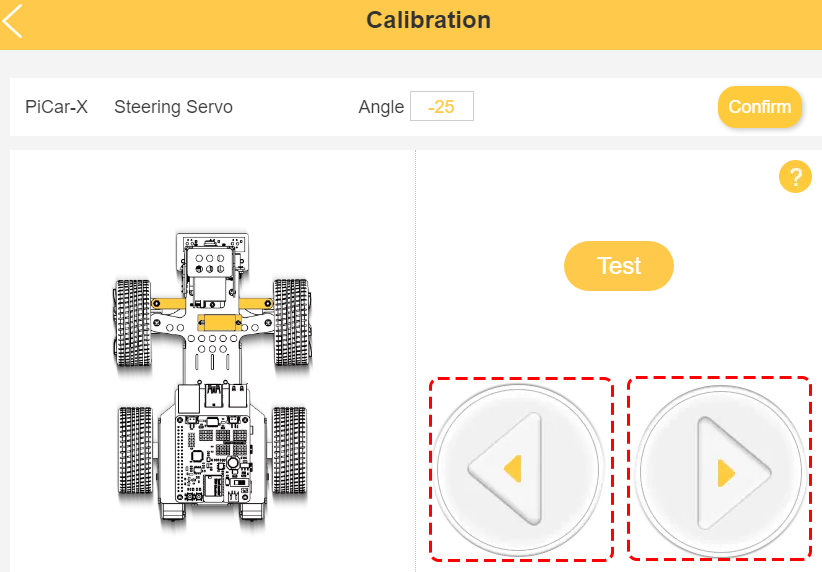
前輪の方向をキャリブレートするには、右のプロンプトポイントをクリックします。右側の2つのボタンを使用して、前輪が正面を向くように調整します。調整が終わったら、 確認 をクリックします。