注釈
こんにちは、SunFounderのRaspberry Pi & Arduino & ESP32愛好家コミュニティへようこそ!Facebook上でRaspberry Pi、Arduino、ESP32についてもっと深く掘り下げ、他の愛好家と交流しましょう。
参加する理由は?
エキスパートサポート:コミュニティやチームの助けを借りて、販売後の問題や技術的な課題を解決します。
学び&共有:ヒントやチュートリアルを交換してスキルを向上させましょう。
独占的なプレビュー:新製品の発表や先行プレビューに早期アクセスしましょう。
特別割引:最新製品の独占割引をお楽しみください。
祭りのプロモーションとギフト:ギフトや祝日のプロモーションに参加しましょう。
👉 私たちと一緒に探索し、創造する準備はできていますか?[here]をクリックして今すぐ参加しましょう!
闘牛
PiCar-Xを怒った牛に変えてみましょう!赤い布、ハンカチなどを用意して、闘牛士になってください。PiCar-Xが赤い布の後を追いかけるときは、当たらないように気をつけてください!
注釈
このプロジェクトは、先行するプロジェクトよりも高度です。PiCar-Xは、カメラが赤い布を向いている方向に応じて本体の向きを自動的に調整するため、色検出機能を使用する必要があります。
ヒント

Start ウィジェットに color detection [red] ブロックを追加して、PiCar-Xが赤色の物体を探すようにします。foreverループに [width] of detected color ブロックを追加して、入力を「オブジェクト検出」グリッドに変換します。
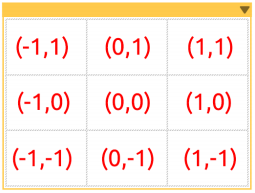
「オブジェクト検出」は、カメラ画像の中心点を基にして、検出された座標を(x, y)の値で出力します。 画面は以下に示すような3x3のグリッドに分けられています。 したがって、赤い布がカメラの画像の左上に保持されている場合、(x, y)の座標は(-1, 1)となります。
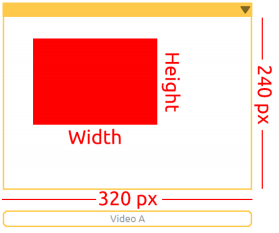
「オブジェクト検出」は、グラフィックの幅と高さを検出します。 複数のターゲットが識別された場合、最大のターゲットの寸法が記録されます。
例
注釈
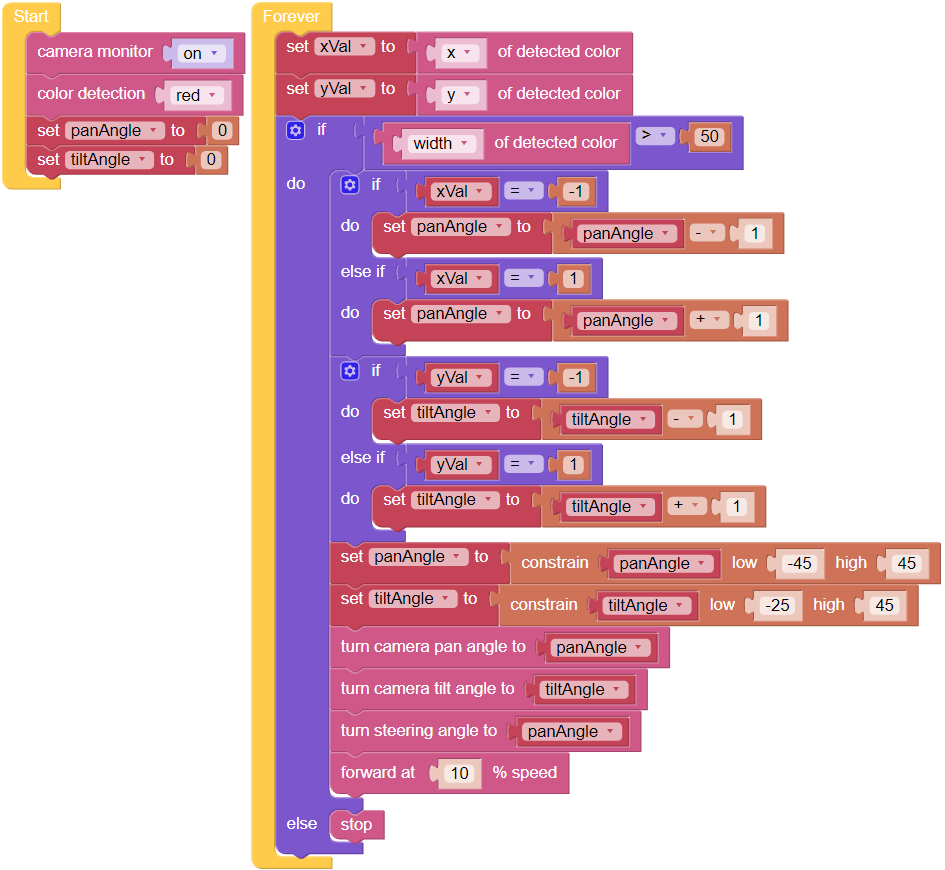
以下の画像に従ってプログラムを書くことができます。チュートリアルを参照してください: How to Create a New Project?。
EzBlock Studioの Examples ページで同じ名前のコードを見つけ、 Run または Edit を直接クリックしてください。